In diesem Beitrag möchte ich dir einen Reichweitenvergleich zwischen dem Ultraschall Abstandssensor HC-SR04 & Laser Distanzsensor geben.
Den Ultraschallabstandssensor HC-SR04 habe ich bereit im Beitrag Arduino Lektion 9: Ultraschall Modul HC-SR04 und den Laser Distanzsensor VL53LXX-V2 im Beitrag Arduino Lektion #103: Laser Distanz Sensor VL53LXX-V2 ausführlich vorgestellt.
Bezug
Beide hier gezeigten Sensoren findest du recht günstig auf den bekannten Internetportalen ebay.de, wish.com, banggood.com und auch auf amazon.de
| Sensor | ebay.de | wish.com | banggood.com | amazon.de |
|---|---|---|---|---|
| HC-SR04 | 1€ .. 3€ | 2€ .. 3€ | 1,29$ .. 2,04$ | 150.. 2,09€* |
| VL53LXX-V2 | 3,2€ .. 6,9€ | – | – | 21€** |
* Umgerechnet aus einer Mehrfachpackung.
** Ein Modul für einen Quadcopter welcher über eine Schnittstelle verfügt.
Ich habe die Module jeweils über ebay.de von einem asiatischen Verkäufer bezogen.
Aufbau der Schaltung
Wie bereits erwähnt habe ich beide Module (HC-SR04 & VL53LXX-V2) bereits jeweils ein eigenes, ausführliches Tutorial gewidmet. Hier nun die Schaltung, wie man beide Module auf einem Breadboard an einem Arduino UNO anschließt.
Für den Nachbau der Schaltung benötigst du:
- einen Arduino UNO,
- ein 400 Pin Breadboard,
- ein Ultraschallsensor HC-SR04,
- ein Laser Distanzsensor VL53LXX-V2,
- diverse Breadboardkabel
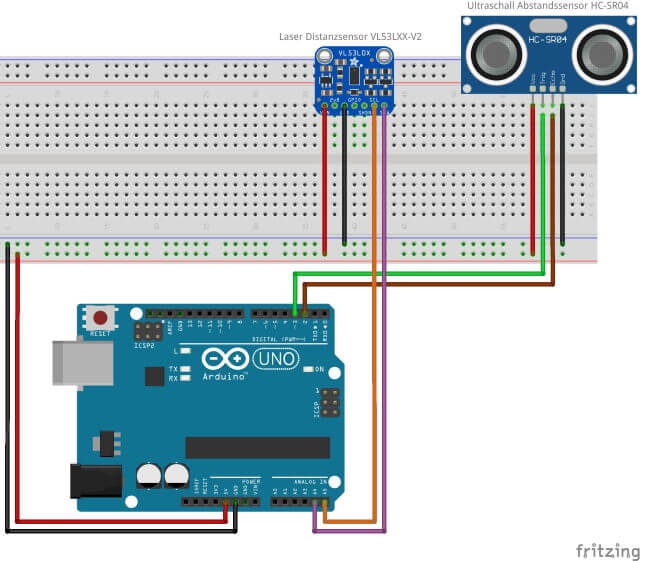
Die Sensoren werden wie folgt am Arduino UNO angeschlossen:
| Sensor | Arduino UNO |
|---|---|
| Ultraschall Abstandssensor HC-SR04 | |
| VCC | 5V |
| TRIG | digitaler Pin D2 |
| ECHO | digitaler Pin D1 |
| GND | GND |
| Laser Distanzsensor VL53LXX-V2 | |
| VIN | 5V |
| GND | GND |
| SCL | analoger Pin A5 |
| SDA | analoger Pin A4 |
Programmieren
Der Laser Distanzsensor wird über I2C angeschlossen und der Ultraschall Abstandssensor über digitale Pins, somit ist es recht einfach beide Sensoren an einem Board zu betreiben.
//Bibliothek für das auslesen des Laser Distanzsensors
#include "Adafruit_VL53L0X.h"
//Konstanten / Variablen für den Laser Distanzsensor
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
//Um die Debug Ausgaben zu aktivieren
//muss dieser Wert auf "true" gesetzt werden.
#define debugSensor false
//Konstanten / Variablen für den Ultraschall Abstandssensor HC-SR04
const int TrigPin = 2; //Der PIN welcher auf das Trigger Signal gelegt wird.
const int EchoPin = 3; //Der PIN welcher auf das Echo Signal gelegt wird.
float cm;
void setup() {
Serial.begin(9600); //Die Übertragungsgeschwindigkeit setzen.
pinMode(TrigPin, OUTPUT); //Den Trigger auf das Output Signal des Sainsmart setzen.
pinMode(EchoPin, INPUT); //Das Echo auf das Input Signal des Sainsmart setzen.
//Wenn der Serielle Port bereit ist dann eine Ausgabe auf diesen tätigen
//und prüfen ob der Sensor korrekt angeschlossen ist (ob dieser Ansprechbar ist)
if (!lox.begin()) {
Serial.println("Fehler beim lesen des Sensors!");
while (1); //eine Endlos Schleife
}
}
void loop() {
Serial.println("");
readLaserDistanceValue();
readUltrasonicValue();
delay(2500); //1sek. warten
}
void readLaserDistanceValue() {
//instanziieren des Sensors zum empfangen von Daten
VL53L0X_RangingMeasurementData_t measure;
lox.rangingTest(&measure, debugSensor);
//lesen des Sensor Status
//der Sensor kann verschiedene Status annehmen,
//jedoch interessiert für uns nur der Wert "4"
int sensorStatus = measure.RangeStatus;
Serial.print("Laser Distanzsensor VL53LXX-V2:\t\t");
//Wenn Daten empfangen wurden dann...
if (sensorStatus != VL53L0X_DEVICEERROR_MSRCNOTARGET) {
Serial.print(measure.RangeMilliMeter / 10);
Serial.println("cm");
} else {
//Wenn keine Daten empfangen wurden dann wird das wahrscheinlich außerhalb der Reichweite sein.
Serial.println("-out of Range-");
}
}
void readUltrasonicValue() {
digitalWrite(TrigPin, LOW); //Trigger Signal ausschalten
delayMicroseconds(2); //2 ms warten
digitalWrite(TrigPin, HIGH); //Trigger Signal einschalten
delayMicroseconds(10); //10ms warten
digitalWrite(TrigPin, LOW); //Trigger Signal ausschalten
cm = pulseIn(EchoPin, HIGH) / 58.0; //Das Empfangene Echo Signal in cm umrechnen
//Da der Sensor mit einer Messgenauigkeit von 0,3cm arbeitet können wir das
//Ergbnis auf 2 Nachkommastellen begrenzen
cm = (int(cm * 100.0)) / 100.0;
Serial.print("Ultraschall Abstandssensor HC-SR04:\t");
Serial.print(cm); //Den Wert auf den Seriellen Monitor ausgeben
Serial.println("cm"); //Der geschriebenen Zeile "cm" anfügen und einen Zeilenumbruch ausführen.
}
Download des Sketches
Hier nun der Sketch / das Programm zum bequemen Download:
Test der Reichweite
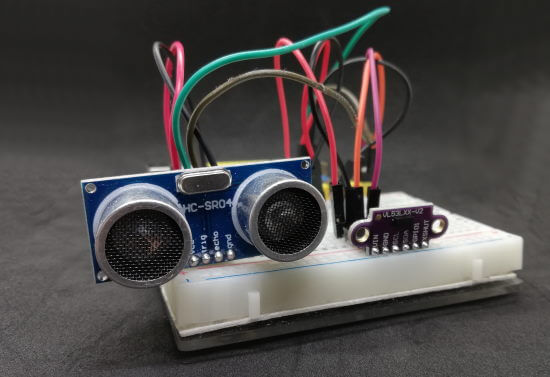
Nachdem nun die Schaltung aufgebaut ist, möchte ich die beiden Sensoren einmal gegeneinander testen. Ich habe dazu einen sehr minimalistischen Aufbau mit einem Zollstock vorbereitet.
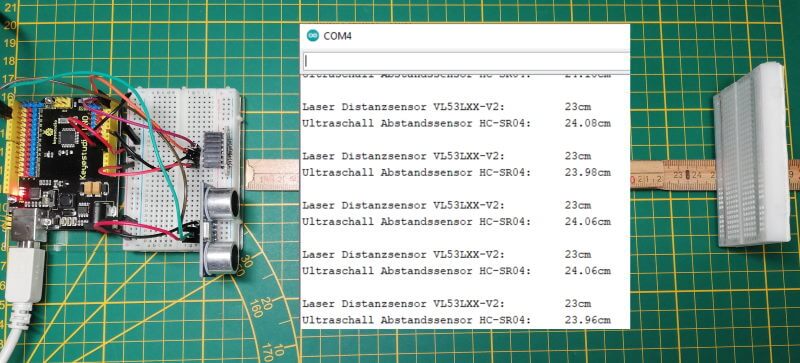
Man erkennt auf dem Bild jedoch sehr gut, das beide Sensoren nicht gerade genau sind, jedoch ist der Ultraschall Abstandssensor HC-SR04 etwas besser als der Laser Distanzsensor.
Video

Fazit zum Reichweitenvergleich mit Ultraschall Abstandssensor & Laser Distanzsensor
Als Fazit zu diesem Vergleich ziehe, ich das beide Sensoren nicht gerade genau sind, daher würde ich beide nicht für einen Zentimeter oder sogar Millimeter genaue messen verwenden wollen. Aber um ein Objekt zu detektieren oder zu erkennen, dass man x Zentimeter von einem anderen Objekt entfernt ist und somit ausweichen sollte, reicht es allemal.
Den Ultraschall Abstandssensor HC-SR04 habe ich zum Beispiel im OTTO DIY Roboter verbaut und dort verrichtet dieser kleine Sensor sicher seinen Dienst.
Letzte Aktualisierung am: 09. März 2024

Hallo mein Name ist Julian,
ich habe gerade ein Projekt am laufen und muss ein Messwerkzeug konstruieren und zwar muss ich den Abstand von einem Bauteil messen. Ich hab den VL531xx Sensor noch nicht ausprobiert aber laut ihrem Fazit waren Sie nicht zufrieden mit dem Sensor im Gegensatz zum Ultraschall Sensor. Ich muss einen Abstand messen und meinem Mikrocontroller sagen das wenn er misst und eine Abweichung von max 1,00mm erkennt, er einen Signal geben muss und ein rotes Lämpchen leuchten muss und wollte mal Fragen ob Sie mir einen Sensor empfehlen können der zwischen 0,1 – 1 mm genau misst (Oberfläche: Aluminium). Habe gedacht das der Lase Sensor besser abschließt da er so gut wie keine Einflüsse von außen aufnimmt und genau misst.
Vielen Dank für die Hilfe
Mit freundlichen Grüße
Hi,
vielen Dank für deinen Kommentar.
Das Problem an diesen günstigen Sensoren ist immer, dass diese nicht kalibriert sind, d.h. es ist immer eine recht ungenaue Messung.
Für ein richtiges Messwerkzeug muss man schon deutlich tiefer in die Tasche greifen siehe https://www.google.de/search?q=distance+sensor+high+precision
diese sind für die von dir genannten Zwecke ausgelegt.
Gruß,
Stefan Draeger
Hallo Stefan,
ein sehr schöner Vergleich zwischen den verschiedenen Messverfahren.
Wenn ich mir aber dein Foto vom Aufbau anschaue, könnte es sein, dass der Lasersensor das gleiche Ergebnis anzeigt wie der Ultraschall Sensor.
Die Platine des Lasersensors steht ca. 1 cm vor der Platine des Ultraschallsensors.
Beim Lasersensor kann man die Null-Linie schon erkennen.
Beim Ultraschallsemsor ist die Null-Linie nicht klar.
Gruß
Andreas