In diesem Artikel zeige ich dir, wie du den Raspberry Pi Pico in der Arduino IDE unter Linux programmieren kannst. Gemeinsam werden wir die Schritte zur Einrichtung und Konfiguration der Entwicklungsumgebung durchgehen, um sicherzustellen, dass du problemlos mit der Programmierung starten kannst.
Den Raspberry Pi Pico gibt es derzeit in zwei Versionen, zum einen mit und ohne WiFi und neuerdings sogar mit Bluetooth Support. Der kleine Zwerg auf dem nachfolgenden Bild ist der XIAO RP2040 welcher auch mit dem RP2040 Chip des Pi Pico daher kommt nur Bauartbedingt weniger Pins als der große hat.

& Raspberry PI Pico
Die Inspiration für diesen Artikel stammt von einem treuen Leser meines Blogs, der aktuell Schwierigkeiten bei der Einrichtung und Konfiguration seines Raspberry Pi Pico hat. Mein Ziel mit diesem Beitrag ist es, ihm und anderen, die auf ähnliche Herausforderungen stoßen, zu helfen und eine Lösung für dieses Problem anzubieten.
Anschluss & Einrichten des Raspberry Pi Pico unter Linux
Zunächst schließen wir den Raspberry Pi Pico an einen freien USB-Anschluss an, dieser sollte dann auch erkannt werden.
oem@anna:~$ lsusb
Bus 001 Device 002: ID 8087:8000 Intel Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 003 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 002 Device 002: ID 0bda:57bc Realtek Semiconductor Corp. USB Camera
Bus 002 Device 003: ID 2e8a:0005 MicroPython Board in FS mode
Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
oem@anna:~$ Nun müssen wir dieses Board in den Bootloader Modus starten, dazu trennen wir zuerst das USB-Kabel wieder vom PC und drücken den kleinen, weißen RESET-Taster auf dem Board und verbinden dann wieder den Raspberry Pi Pico (mit gedrückter RESET-Taste) mit dem PC.
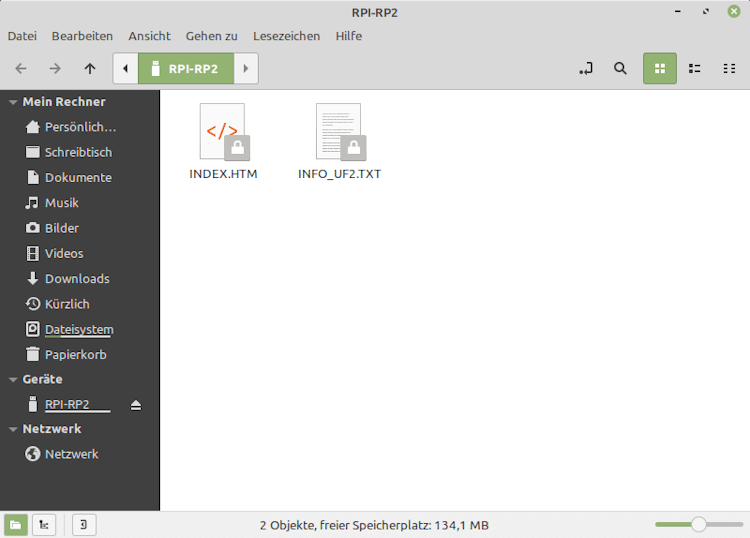
Im Dateimanager sollte dann ein neues Laufwerk „RPI-RP2“ sichtbar sein. In meinem Fall hatte ich sogar auf dem Desktop noch ein zusätzliches Symbol für dieses Laufwerk erhalten.
Installieren der Treiber für die Arduino IDE unter Linux
Jetzt wechseln wir zur Arduino IDE, in meinem Fall hatte ich bereits die Version 1.8.18 auf meinem Linux Mint 20.2 installiert, welches ich weiter nutze.
oem@anna:~$ lsb_release -a
No LSB modules are available.
Distributor ID: Linuxmint
Description: Linux Mint 20.2
Release: 20.2
Codename: uma
oem@anna:~$ Schritt 1 – Erweitern der zusätzlichen Boardverwalter-URLs
Als ersten Schritt müssen wir der Arduino IDE eine neue Quelle für Boardtreiber angeben, dieses wird im Dialog „Zusätzliche Boardverwalter URLs“ gemacht. Du erreichst diesen über „Datei“ > „Voreinstellungen“ > „Zusätzliche Boardverwalter URLs“
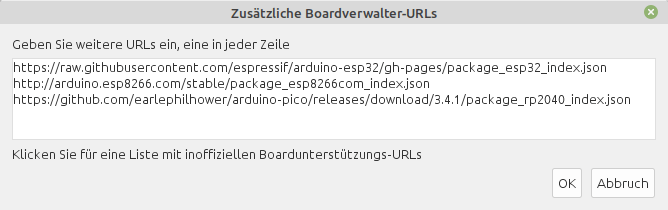
Hier fügen wir die nachfolgende URL hinzu und betätigen die Schaltfläche „OK“
https://github.com/earlephilhower/arduino-pico/releases/download/3.4.1/package_rp2040_index.jsonSchritt 2 – Installieren des Boardtreibers über den Boardverwalter
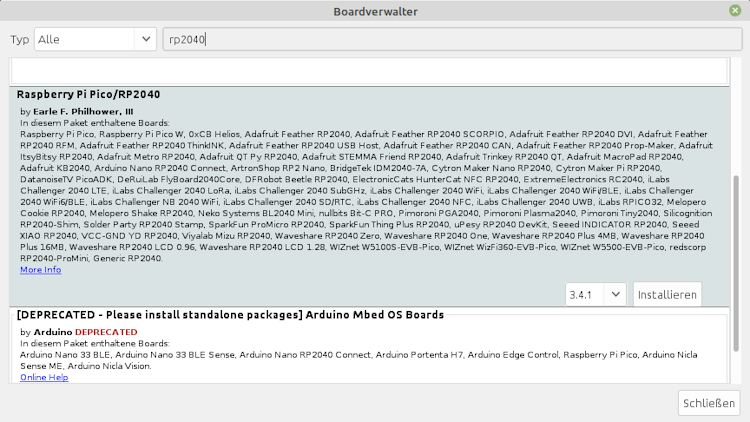
Nachdem wir die neue Quelle für unseren Boardtreiber angegeben haben, können wir in den Boardverwalter wechseln. Diesen findest du unter „Werkzeuge“ > „Board: xyz“ > „Boardverwalter…“. In diesem Dialog suchst du nun nach „rp2040“ und wählst die Schaltfläche „Installieren“ am Paket „Raspberry Pi Pico/RP2040“ aus.
Es werden jetzt diverse Dateien heruntergeladen, die Verbindung war in meinem Fall nicht sehr stabil und somit musste ich diesen Vorgang insgesamt dreimal starten. Das gute war jedoch, dass der Installer am letzten Schritt weitergemacht hat, somit dauerte dieser Vorgang nur wenige Minuten.
Schritt 3 – Auswahl des Boardtreibers
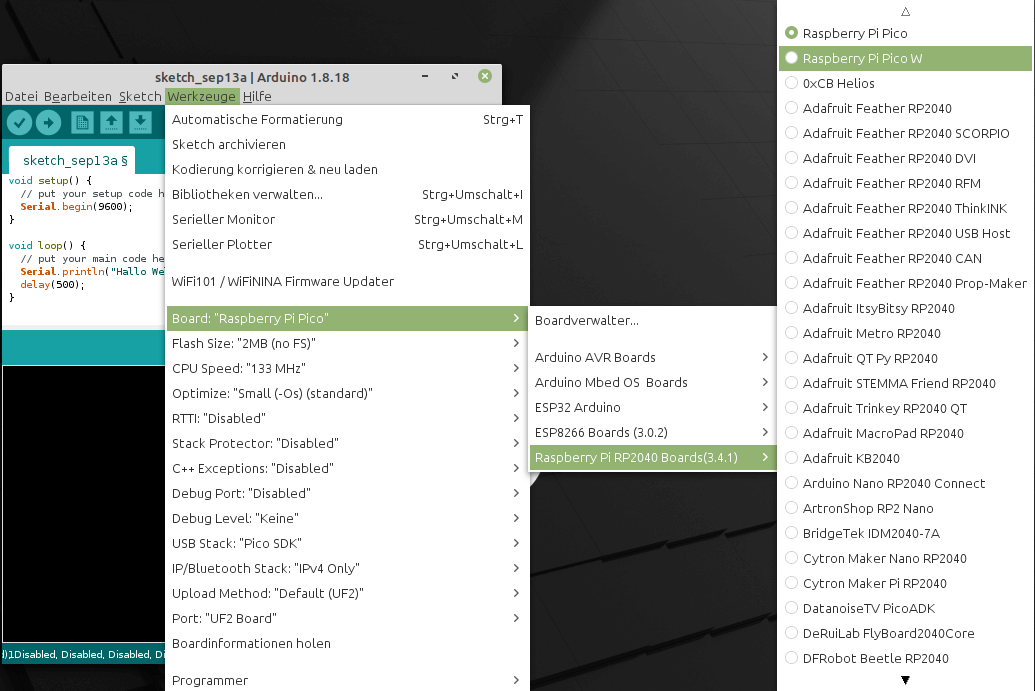
Wenn der Boardtreiber für den Raspberry Pi Pico erfolgreich installiert wurde, dann wählen wir diesen aus „Werkzeuge“ > „Board: xyz“ > „Raspberry Pi RP2040 Boards (3.4.1)“ aus. In meinem Fall habe ich einen normalen RP2040 also ohne WiFi Support gewählt.
Im nächsten Schritt müssen wir noch sicherstellen das, der korrekte Anschluss gewählt ist, hier muss „UF2 Board angewählt sein.

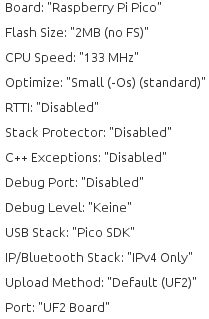
Die Konfiguration des Boards habe ich nicht verändert und mit dieser hat der Upload eines ersten Sketches auch funktioniert.
Testen der Installation & Konfiguration mit einem kleinen Sketch
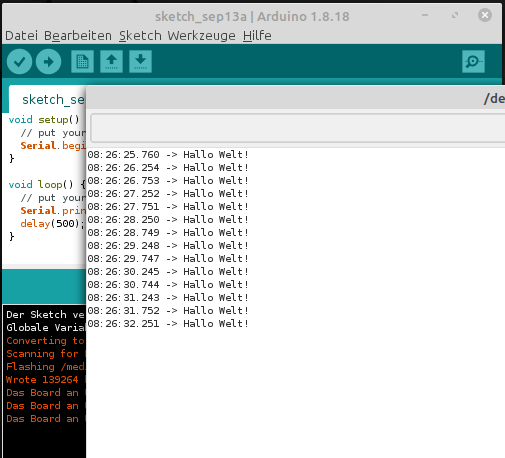
Nachdem jetzt alles eingerichtet ist, testen wir unsere Installation & Konfiguration einmal. Dazu schreiben wir ein kleines Sketch welches uns lediglich die Textzeile „Hallo Welt!“ auf der seriellen Schnittstelle ausgibt.
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println("Hallo Welt!");
delay(500);
}
Der Upload-Button führt dann nachfolgende Schritte aus:
- prüfen & kompilieren des Codes,
- Umwandeln in eine UF2-Datei,
- suchen nach Laufwerken / RP2040 Geräten,
- kopieren der erzeugten UF2-Datei auf das gefundene Laufwerk
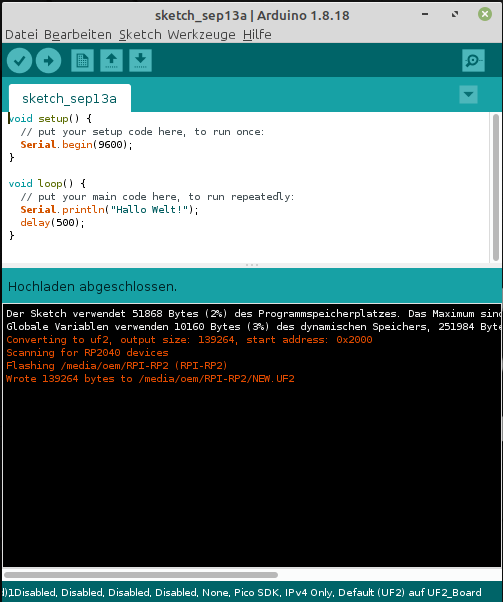
Wenn wir uns nun die Ausgabe im seriellen Monitor anschauen möchten, erhalten wir eine Fehlermeldung, denn im letzten Schritt wurde der RP2040 neu geflasht und dann mit einem neuen Anschluss eingebunden.
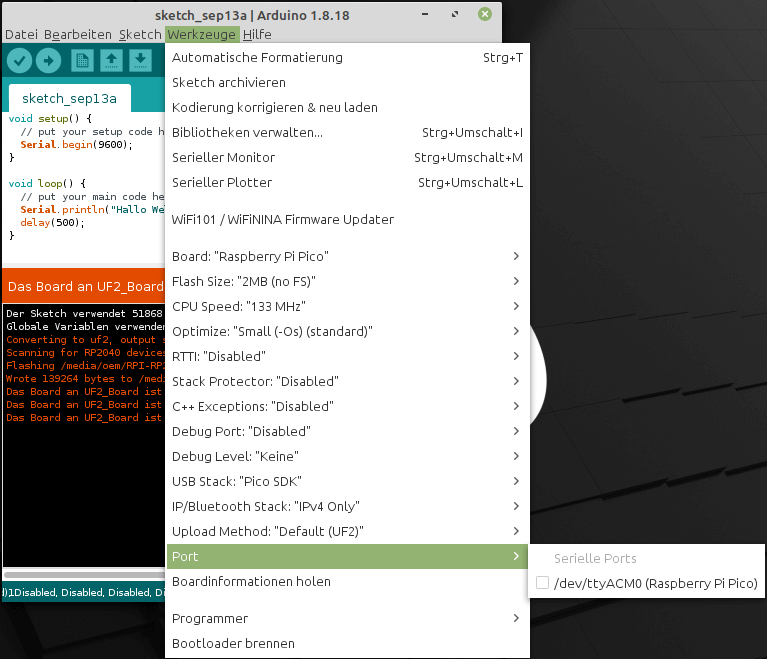
Diesen Anschluss müssen wir dann zunächst unter „Werkzeuge“ > „Port“ auswählen.
Nun können wir wie gewohnt den seriellen Monitor öffnen und sehen unsere Ausgabe „Hallo Welt!“ (hier zusätzlich mit einem Zeitstempel).
Abschluss & Ausblick
Ich habe dir jetzt gezeigt, wie du deinen Raspberry Pi Pico unter Linux einrichten und ein erstes Sketch auf diesen speichern kannst. Die Information dazu musste ich jedoch zunächst auch erstmal suchen, dass dieses nicht so einfach ist. Hier habe ich mir als Quelle den Beitrag Raspberry Pico mit der Arduino IDE programmieren vom Heise-Verlag genommen.
Im nächsten Beitrag würde ich mir mal den Raspberry Pi Pico mit WiFi und neuerdings auch Bluetooth Support nehmen und testen, wie man dort einen kleinen Webserver programmiert.
Letzte Aktualisierung am: 13. September 2023

1 thought on “Raspberry Pi Pico: Programmierung und Entwicklung mit der Arduino IDE auf Linux”