Möchtest du etwas über die Entstehung des OTTO DIY wissen? Dann bist du hier genau richtig!
Es ist kein Geheimnis wo sich Camilo Parra Palacio die Idee für den OTTO sich geholt hat. Das erste Projekt „Tito“ ist aus dem #OSHWA Projekt entstanden und basierte auf 4 große Futaba Servos und dem klassischen Arduino UNO.
Bob the biped
Das Projekt „Bob“ wurde vom Creator Kevin Biagini entwickelt. Der Creator möchte mit diesem Projekt erreichen, dass vor allem Kinder erste Erfahrungen mit Robotern sammeln. Dieses hat er durch einen leicht zusammenbau und programmierbaren Roboter namens Bob erreicht. Die ersten Bobs wurden nur auf dem Reißbrett entwickelt da Kevin Biagini nicht über einen eigenen 3D-Drucker verfügte.
Ein großes „Problem“ dieses Roboters war es jedoch, dass die Elektronik und die Kabel auf der Rückseite waren und vor allem, dass die Bewegungen sehr schwach waren. Der Bob wurde zum Projekt „Rob“ weiter entwickelt und bekam ein 6DOF Upgrade und eine Bluetoothschnittstelle. Vor allem kann nun das Board an den Roboter geschraubt werden, anstatt wie früher das extra Löcher gebohrt werden müssen.

Zowi
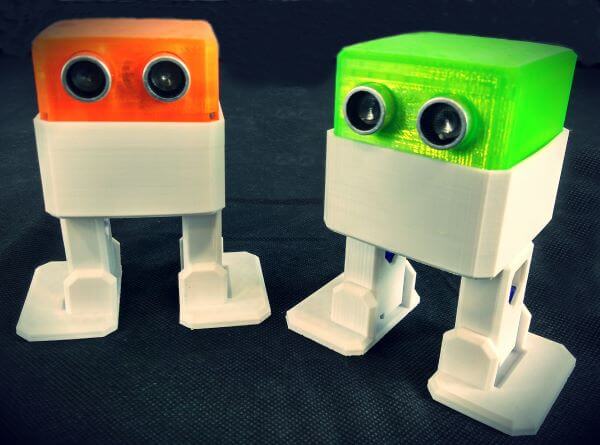
Als Zowi auf den Markt kam hat dieser die Geschichte der Bipeds-Roboter und der Open-Source-Hardware Welt grundlegend verändert, denn dieser biete erstmals alles in einem Roboter.

Dieser hatte:
- Ultraschall Abstandssensoren,
- eine App (zum steuern),
- Bluetooth,
- ein Arduino kompatibles Board,
- wiederaufladbare Batterien,
- ein LED Mund
und konnte mit Hilfe von Blöcken programmiert werden.
Es war ein Riesensprung in der Technik vom Bob, der Zowi war größer, hatte stärkere Servos und durch die Verwendung der Oscillator Algoritmus Bibliothek von Juan Gonzalez Gomez Obijuan konnte dieser noch einfacher programmiert werden.
Die Firma BQ company vertreibt diesen Roboter in einer leicht veränderten Version. Diese Version ist aus widerstandsfähigem ABS Kunststoff statt wie aus dem 3D Drucker aus PLA, jedoch mit einem Preis von knapp 129 € nicht gerade günstig. Ein großer Kostenfaktor war bei diesem Bausatz die Servos welche sehr teuer in der Anschaffung und im Zusammenbau waren.
Damit war die Stunde des Tito geboren. Der Entwickler überlegt sich zunächst ein paar Features, welche dieser unterstützen muss, dieses waren unter anderem:
- ein Arduino UNO (oder kleiner) Board im Kopf des Roboters,
- LED Mund mit 3 LEDs,
- abgerundeten Kopf,
- das Gehäuse muss vereinfacht werden,
- einfach neu zu programmieren und vor allem
- mit Anschlüssen auf der Rückseite
all diese Features wurden zu einem neuen Roboter umgesetzt welcher unter der Bezeichnung „Tito“ veröffentlicht wurde.
Tito
Mit dem Tito konnte man sehr schnell erlernen was alles Fehlt und wo es noch Schwachstellen gibt, zbsp. wurden immer noch die recht teuren Servos verbaut.
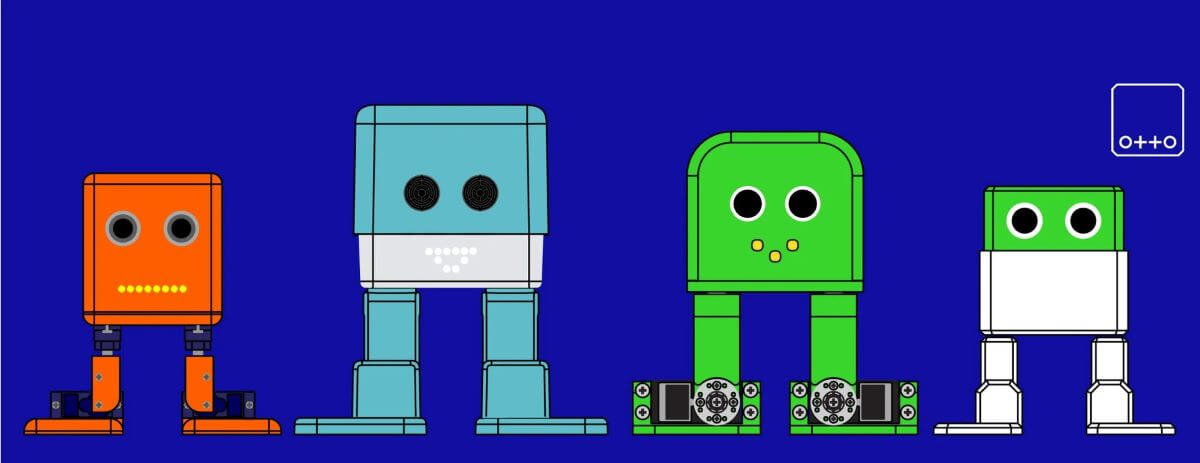
Otto
Der Name Otto kommt eigentlich vom japanischen Wort „Robotto“, das Logo Design ist eine abstrakte Form des Kopfes mit dem Schriftzug in einer Computergerechten Darstellung.
Im Vergleich zu den anderen Robotern sind die Teile für den Otto „von der Stange“ d.h. es sind keine speziellen Bauteile erforderlich welche man nur in bestimmten Shops bekommt.
Die Teile, welche aus dem 3D Drucker stammen sind günstig gehalten, man verzichtet zbsp. auf Supportmaterial und starre Strukturen mit Fasen. Das beste jedoch ist die Verwendung des kleinsten Arduinos, dem Nano.
Es gibt nun eine neue Version des Ottos, die Plus Version, welche etwas näher am eigentlichen Zowi Projekt ist. Man sieht also, das Projekt wächst immer weiter.
Möchtest du Teil dieses Projektes werden? Dann baue deinen eigenen kleinen Roboter und werde Teil einer riesigen weltweiten Community.
Letzte Aktualisierung am: 01. Mai 2023
