Passend zur kommenden Halloween-Zeit möchte ich dir heute ein passendes kleines Projekt vorstellen, welches du easy an einem Wochenende erstellen kannst, es ist eine Spooky Box mit Soundausgabe. Als Mikrocontroller verwende ich den Raspberry Pi Pico in der Ausführung mit WiFi / Bluetooth.

Die Idee dazu bekam ich vom Leser meines Blogs, welcher mir per Mail ein ähnliches Projekt vorgestellt hat. Dieses war jedoch mit dem weniger verbreiteten Calliope Mini. Der Vorteil des Calliope Mini ist jedoch, dass dieser besonders für Anfänger einfacher zu programmieren ist. Jedoch auch die Programmierung in MicroPython ist, wie du gleich sehen wirst, nicht allzu schwierig.
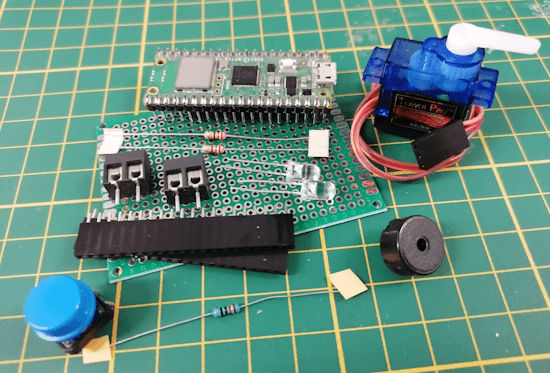
Teileliste für die Spooky Box mit einem Raspberry Pi Pico
Wenn du die Spooky Box nachbauen möchtest, dann benötigst du:
- einen Raspberry Pi Pico* oder Pico W*,
- ein Micro-USB-Datenkabel*,
- eine Lochrasterplatine*,
- zwei 40 Pin Buchsenleisten*,
- zwei LEDs mit Vorwiderstände (220 Ohm)*,
- einen Taster*,
- einen Servomotor Typ SG90*,
- einen Piezo Buzzer*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
Für den Aufbau auf der Lochrasterplatine benötigst du noch zusätzlich:
- einen Lötkolben,
- Lötzinn & Lötfett,
- eine hitzebeständige Unterlage
- einen kleinen Seitenschneider,
- Litze / Draht in unterschiedlichen Farben
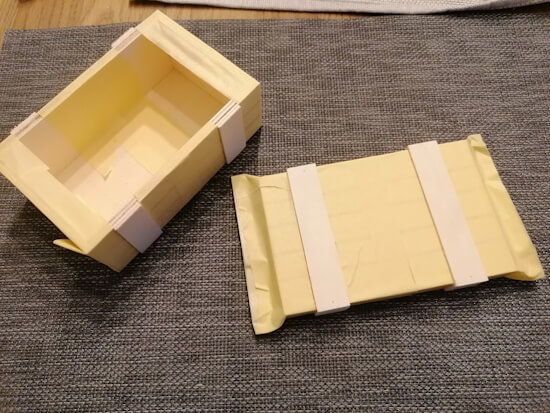
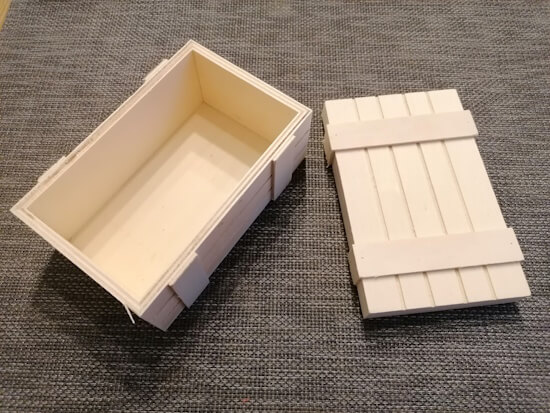
Spooky Box
Die Box selber habe ich aus dem örtlichen Tedi Mark für 3 € gekauft, zusätzlich noch Acrylfarbe und Pinsel, somit ergab dieses genau 6 €.
Wenn du das ganze online suchst, dann findest du hier eine kleine Liste:
- eine kleine Schatzkiste aus Holz*,
- Acrylfarbe*,
- Pinselset*,
Der Vorteil an der Acrylfarbe ist, dass diese recht schnell trocknet. Du kannst deine Spooky Box natürlich nach Belieben anders bemalen und bekleben.



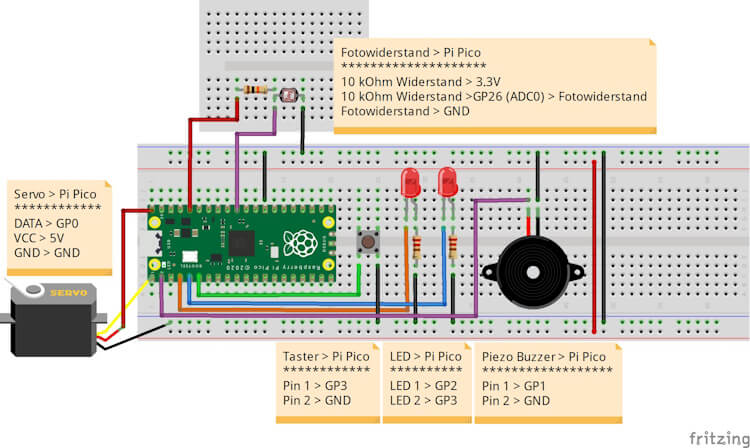
Aufbau der Schaltung am Raspberry Pi Pico
Nachdem die Box fertig bemalt ist und trocknen muss, kümmern wir uns um die Schaltung am Raspberry Pi Pico.
Programmieren
Das Programm erstellen wir wie erwähnt in MicroPython, dafür nutze ich die Thonny IDE. Das Gute gleich vorweg, wir benötigen keine zusätzliche Bibliothek für dieses Projekt, d.h. du könntest auch rein theoretisch den MU-Editor verwenden.
Nachfolgend folgt nun eine Schritt-für-Schritt-Anleitung, wie du das Programm aufbaust.
Schritt 1 – Abspielen des Halloween Sounds am Raspberry Pi Pico
Die Spooky Box soll bei Aktivierung einen Sound abspielen, diesen habe ich jedoch lediglich für ein Arduino Programm gefunden, dieses habe ich für MicroPython umgeschrieben.
#Module zum ansteuern der GPIOs und
#erzeugen eines PWM Signals
from machine import Pin, PWM
from utime import sleep
#der Buzzer ist am GPIO1 angeschlossen
buzzer = PWM(Pin(1))
#Tonname & Frequenz in einem Dictionary mappen
tones = {
"cs6": 1109,
"fs5" : 740,
"d6" : 1175,
"c6" : 1047,
"f5" : 698,
"b5" : 988,
"e5" : 659,
"bf5" : 932,
"ef5" : 622,
"b4" : 494,
"g5" : 784,
}
#Töne vom Lied
song = ["cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4"]
#Spielt einen Ton in einer Frequenz ab
def playtone(frequency):
buzzer.duty_u16(1000)
buzzer.freq(frequency)
#Verstummt den Buzzer
def bequiet():
buzzer.duty_u16(0)
#Spielt das Lied ab
def playsong(mysong):
#läuft über die Liste mit den Tönen
for i in range(len(mysong)):
#abspielen eines Tones aus der Liste mit dem Index i
playtone(tones[mysong[i]])
#kleine Pause von 200 Millisekunden
sleep(0.2)
#verstummen des Buzzers
bequiet()
#Abspielen des Liedes
playsong(song)
Der Code bewirkt lediglich das, dass Lied auf dem Piezo Buzzer abgespielt wird.
Schritt 2 – Auslesen des Fotowiderstandes
Der Fotowiderstand ist am ADC0 / GP26 angeschlossen und wird als analoger Wert ausgelesen.
#Module für das auslesen des LDR
from machine import Pin, ADC
from utime import sleep
#der LDR ist am GPIO26 / ADC0 angeschlossen
adc = ADC(0)
#Starten einer Endlosschleife
while True:
#auslesen des LDR und
#ausgeben auf der seriellen Schnittstelle
print(adc.read_u16())
#kleine Pause von 300 Millisekunden
sleep(0.3)
Wenn du den obrigen Code ausführst, dann wird kontinuierlich die Helligkeit gemessen und ausgegeben. Solltest du deinen Finger auf diesen Sensor legen, so ändert sich der Wert in der Konsole entsprechend.
Auf diesen Wert können wir jetzt reagieren und somit erkennen, ob der Deckel unserer Spooky Box geöffnet wurde.
Schritt 3 – Taster interrupt erstellen
Wenn der Taster betätigt wird, soll der Sound aufhören zu spielen und die kleine Pappfigur soll abgesenkt werden. Dazu müssen wir einen Interrupt erstellen, der Pi Pico bietet an jeden der GPIOs die Möglichkeit ein Interrupt anzuhängen.
#Module zum ansteuern der GPIOs
from machine import Pin
#der Taster ist am GPIO5 angeschlossen,
#zusätzlich wird dieser über den internen PullUp
#Widerstand verbunden
button = Pin(5, Pin.IN, Pin.PULL_UP)
#Funktion welche ausgeführt werden soll
#wenn der Taster betätigt wird.
def button_handler(pin):
print("Hello, world!")
#konfigurieren eines Interrupts
button.irq(trigger = machine.Pin.IRQ_RISING, handler = button_handler)
#Starten einer Endlosschleife,
#diese wird benötigt damit das Programm sich nicht selbstständig beendet
while True:
pass
Wenn du den Taster betätigst, wird die Funktion „button_handler“ ausgeführt. Egal, was gerade parallel auf dem Mikrocontroller ausgeführt wird.
Schritt 4 – Steuern des Servomotors
Der Servomotor wird per PWM Signal gesteuert, hier musst du noch zusätzlich ins Datenblatt des verwendeten Servos schauen. Wenn du wie ich den Servo SG90 verwendest, dann hat dieser die Frequenz von 50 Hz für einen Schritt.
#Module zum steuern der GPIOs
from machine import Pin, PWM
from utime import sleep
#Servomotor am GPIO0 angeschlossen
servo = PWM(Pin(0))
#der Servomotor arbeitet mit einer
#Frequenz von 50 Hz
servo.freq(50)
#0° hat ein Dutycycle von..
grad0 = 500000
#90° hat ein Dutycycle von..
grad90 = 1500000
#Starten einer Endlosschleife
while True:
#Servo auf 90° bewegen
servo.duty_ns(grad90)
#kleine Pause von 500 Millisekunden
sleep(0.5)
#Servo auf 0° bewegen
servo.duty_ns(grad0)
#kleine Pause von 500 Millisekunden
sleep(0.5)
Der Code lässt den Servomotor immer zwischen den Winkeln 0° und 90° bewegen.
Probleme mit zwei unterschiedliche PWM Signale
Der Piezo Buzzer & der Servomotor werden beide über PWM Signale gesteuert. Das Problem, welches wir haben ist, dass der Pi Pico lediglich ein Signal zulässt. Wir müssen also nun etwas herumtricksen, dass der Piezo Buzzer das Lied abspielt, aber der Servo auch gesteuert werden kann.
Meine Lösung hierzu ist, dass ich den jeweils nicht benötigten Aktor auf einen GPIO zuweise, welcher nicht belegt ist, somit ist der Aktor quasi deaktiviert. Bevor ich diesen wieder verwende, muss dieser dann lediglich wieder korrekt zugewiesen werden.
from machine import Pin, PWM
from utime import sleep
servo = None
buzzer = None
grad0 = 500000
grad90 = 1500000
tones = {
"cs6": 1109,
"fs5" : 740,
"d6" : 1175,
"c6" : 1047,
"f5" : 698,
"b5" : 988,
"e5" : 659,
"bf5" : 932,
"ef5" : 622,
"b4" : 494,
"g5" : 784,
}
song = ["cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"cs6", "fs5", "fs5", "cs6", "fs5", "fs5", "cs6", "fs5", "d6", "fs5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"c6", "f5", "f5", "c6", "f5", "f5", "c6", "f5", "cs6", "f5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"b5", "e5", "e5", "b5", "e5", "e5", "b5", "e5", "c6", "e5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"bf5", "ef5", "ef5", "bf5", "ef5", "ef5", "bf5", "ef5", "b5", "ef5",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4",
"fs5", "b4", "b4", "fs5", "b4", "b4", "fs5", "b4", "g5", "b4"]
def playtone(frequency):
if isinstance(buzzer, Pin):
initBuzzer()
buzzer.duty_u16(1000)
buzzer.freq(frequency)
def bequiet():
if isinstance(buzzer, Pin):
initBuzzer()
buzzer.duty_u16(0)
def playsong(mysong):
for i in range(len(mysong)):
if (mysong[i] == "P"):
bequiet()
else:
playtone(tones[mysong[i]])
sleep(0.2)
bequiet()
#GPIO des Servomotor initialisieren
def initServo():
global servo
servo = PWM(Pin(0))
servo.freq(50)
#konfigurierten Pin ändern
def resetServo():
global servo
servo = Pin(8, Pin.IN, Pin.PULL_UP)
#GPIO Buzzer initialisieren
def initBuzzer():
global buzzer
buzzer = PWM(Pin(1))
#konfigurierten Pin ändern
def resetBuzzer():
global buzzer
buzzer = Pin(9, Pin.IN, Pin.PULL_UP)
while True:
initServo()
servo.duty_ns(grad90)
sleep(0.5)
servo.duty_ns(grad0)
sleep(0.5)
resetServo()
sleep(0.2)
initBuzzer()
sleep(0.2)
playsong(song)
sleep(0.2)
resetBuzzer()
sleep(0.2)
Im Video siehst du nun das zunächst der Servo von 0° zu 90° wechselt und danach wird das Lied abgespielt.
Das fertige Programm für die Spooky Box am Raspberry Pi Pico
Hier jetzt das fertige Programm zum Download:
Letzte Aktualisierung am: 10. März 2024

Hallo Stephan,
kann man M-Python nicht auch auf einem Calliope laufen lassen?
VG
Hi,
das geht wohl, das schaue ich mir mal an.
https://github.com/calliope-mini/calliope-mini-micropython
Gruß,
Stefan Draeger