In diesem Beitrag möchte ich dir eine kleine, einfache DIY Einparkhilfe mit einem Arduino Nano, einem Ultraschall Abstandssensor HC-SR04, 3 LEDs sowie einem Piezo Buzzer vorstellen.
benötigte Ressourcen für die einfache DIY Einparkhilfe
Für den Nachbau des hier gezeigten Beitrages benötigst du:
- einen Arduino Nano*,
- ein passendes USB Datenkabel*
- ein 400 Pin Breadboard*,
- diverse LEDs*,
- 2x 5mm, rot
- 3x 5mm, gelb,
- 2x 5mm, grün
- sieben 220 Ohm Widerstände*,
- einen Piezo Buzzer*,
- einen Ultraschall Abstandssensor HC-SR04*,
- ein 830 Pin Breadboard*,
- ein paar Breadboardkabel*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
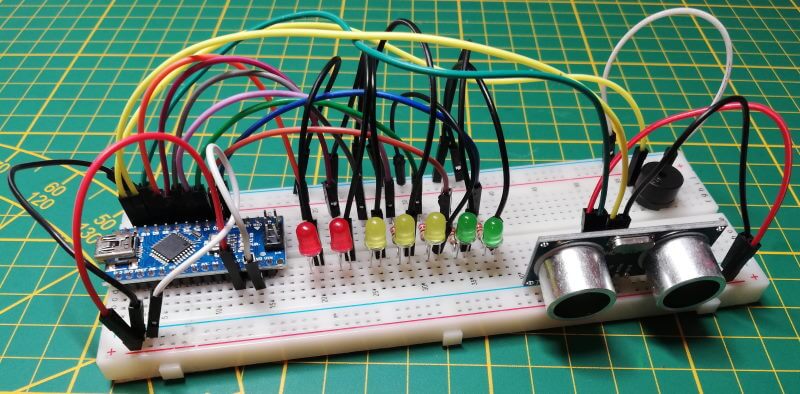
Aufbau der Schaltung
Der Aufbau der Schaltung passt genau auf ein 830 Pin Breadboard.
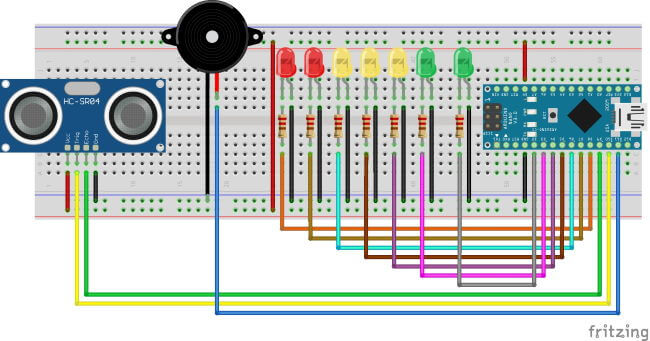
Hier nun eine Tabelle mit den elektronischen Komponenten und wo diese an den Arduino Nano angeschlossen wird.
| Bauteil | Arduino Nano |
|---|---|
| LED, rot1 | D8 |
| LED, rot2 | D7 |
| LED, gelb1 | D6 |
| LED, gelb2 | D5 |
| LED, gelb3 | D4 |
| LED, grün1 | D3 |
| LED, grün2 | D2 |
| Piezo Buzzer | D11 |
| Ultraschall Abstandssensor HC-SR04 | |
| VCC | 5V |
| TRIG | D10 |
| ECHO | D9 |
| GND | GND |
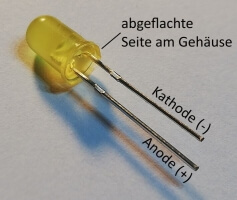
exkurs Aufbau einer Leuchtdiode (LED)
Eine Leuchtdiode (kurz LED) verfügt über 2 Beinchen. Das kurze Beinchen der LED ist der Minuspol und das lange Beinchen der Pluspol der LED. Den Minuspol erkennst du zusätzlich an einer abgeflachten Seite am Gehäuse.
An dem Pluspol der LED wird der digitale Pin vom Microcontroller angeschlossen!
Sollte die LED einmal nicht leuchten so hast du diese mit sehr hoher Wahrscheinlichkeit einfach nur falschherum angeschlossen.
Programmierung
Das Programm ist recht einfach gestrickt. Gehen wir nun trotzdem Stück für Stück dieses einmal durch.
Zunächst fällt dir bestimmt auf das wir in diesem Programm ohne Bibliotheken auskommen können und somit ist der Speicherbedarf recht klein.
Zunächst definieren wir die Pins für die LEDs, dem Piezo Buzzer und natürlich dem Ultraschall Abstandssensor HC-SR04.
//definieren der Pins für die LEDs #define ledRot1 8 #define ledRot2 7 #define ledGelb1 6 #define ledGelb2 5 #define ledGelb3 4 #define ledGruen1 3 #define ledGruen2 2 //definieren der Pins für den Ultraschall Abstandssensor HC-SR04 #define trigger 9 #define echo 10 //definieren des Pins für den Piezo Buzzer #define buzzer 11
Danach benötigen wir ein paar Konstanten für die Zeit zwischen zwei Piepen des Piezo Buzzers.
//Intervall für das Piepsen des Buzzers const int BUZZER_INTERVALL_ROT1 = 35; const int BUZZER_INTERVALL_ROT2 = 100; const int BUZZER_INTERVALL_GELB1 = 125; const int BUZZER_INTERVALL_GELB2 = 250; const int BUZZER_INTERVALL_GELB3 = 275; const int BUZZER_INTERVALL_GRUEN1 = 450; const int BUZZER_INTERVALL_GRUEN2 = 600;
In der Funktion „setup“ werden die Pins als Ausgang / Eingang definiert.
void setup() {
pinMode(ledRot1, OUTPUT);
pinMode(ledRot2, OUTPUT);
pinMode(ledGelb1, OUTPUT);
pinMode(ledGelb2, OUTPUT);
pinMode(ledGelb3, OUTPUT);
pinMode(ledGruen1, OUTPUT);
pinMode(ledGruen2, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
}
Die Funktion „loop“ verrichtet die eigentliche Arbeit und prüft in einer verschachtelten If-Bedingung den Abstand und aktiviert die entsprechende LED.
void loop() {
float value = readUltrasonicValue();
if (value > 0 && value < 5) {
setCurrentStatus(1, 0, 0, 0, 0, 0, 0, BUZZER_INTERVALL_ROT1);
} else if (value > 5 && value < 10) {
setCurrentStatus(0, 1, 0, 0, 0, 0, 0, BUZZER_INTERVALL_ROT2);
} else if (value > 10 && value < 15) {
setCurrentStatus(0, 0, 1, 0, 0, 0, 0, BUZZER_INTERVALL_GELB1);
} else if (value > 15 && value < 20) {
setCurrentStatus(0, 0, 0, 1, 0, 0, 0, BUZZER_INTERVALL_GELB2);
} else if (value > 20 && value < 25) {
setCurrentStatus(0, 0, 0, 0, 1, 0, 0, BUZZER_INTERVALL_GELB3);
} else if (value > 25 && value < 30) {
setCurrentStatus(0, 0, 0, 0, 0, 1, 0, BUZZER_INTERVALL_GRUEN1);
} else if (value > 30) {
setCurrentStatus(0, 0, 0, 0, 0, 0, 1, BUZZER_INTERVALL_GRUEN2);
}
}
Für das aktivieren / deaktivieren der LEDs habe ich eine zusätzliche Funktion geschrieben welche 8 Parameter erwartet:
void setCurrentStatus(int statusLedRot1,
int statusLedRot2,
int statusLedGelb1,
int statusLedGelb2,
int statusLedGelb3,
int statusLedGruen1,
int statusLedGruen2,
int buzzerIntervall) {
digitalWrite(ledRot1, statusLedRot1);
digitalWrite(ledRot2, statusLedRot2);
digitalWrite(ledGelb1, statusLedGelb1);
digitalWrite(ledGelb2, statusLedGelb2);
digitalWrite(ledGelb3, statusLedGelb3);
digitalWrite(ledGruen1, statusLedGruen1);
digitalWrite(ledGruen2, statusLedGruen2);
makeBeep(buzzerIntervall);
}
void makeBeep(int intervall) {
//einen Ton mit einer Frequenz von 800 Hz und einer Dauer von 45ms ausgeben.
tone(buzzer, 800, 45);
//eine Pause einlegen
//je näher das Objekt ist, desto kürzer ist der Intervall
delay(intervall);
}
Das auslagern dieses Codes in eine extra Funktion hat den Vorteil das doppelter Code entfällt und auch somit wieder Speicherplatz frei wird.
In der Funktion „readUltrasonicValue“ wird der aktuelle Wert vom Ultraschall Abstandssensor HC-SR04 gelesen und in Zentimeter zurück geliefert.
float readUltrasonicValue() {
digitalWrite(trigger, LOW); //Trigger Signal ausschalten
delayMicroseconds(2); //2 ms warten
digitalWrite(trigger, HIGH); //Trigger Signal einschalten
delayMicroseconds(10); //10ms warten
digitalWrite(echo, LOW); //Trigger Signal ausschalten
float cm = pulseIn(echo, HIGH) / 58.0; //Das Empfangene Echo Signal in cm umrechnen
//Da der Sensor mit einer Messgenauigkeit von 0,3cm arbeitet können wir das
//Ergbnis auf 2 Nachkommastellen begrenzen
return (int(cm * 100.0)) / 100.0;
}
kompletter, fertiger Sketch für die DIY Einparkhilfe mit einem Arduino Nano
//definieren der Pins für die LEDs
#define ledRot1 8
#define ledRot2 7
#define ledGelb1 6
#define ledGelb2 5
#define ledGelb3 4
#define ledGruen1 3
#define ledGruen2 2
//definieren der Pins für den Ultraschall Abstandssensor HC-SR04
#define trigger 9
#define echo 10
//definieren des Pins für den Piezo Buzzer
#define buzzer 11
//Intervall für das Piepsen des Buzzers
const int BUZZER_INTERVALL_ROT1 = 35;
const int BUZZER_INTERVALL_ROT2 = 100;
const int BUZZER_INTERVALL_GELB1 = 125;
const int BUZZER_INTERVALL_GELB2 = 250;
const int BUZZER_INTERVALL_GELB3 = 275;
const int BUZZER_INTERVALL_GRUEN1 = 450;
const int BUZZER_INTERVALL_GRUEN2 = 600;
void setup() {
pinMode(ledRot1, OUTPUT);
pinMode(ledRot2, OUTPUT);
pinMode(ledGelb1, OUTPUT);
pinMode(ledGelb2, OUTPUT);
pinMode(ledGelb3, OUTPUT);
pinMode(ledGruen1, OUTPUT);
pinMode(ledGruen2, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
}
void loop() {
float value = readUltrasonicValue();
if (value > 0 && value < 5) {
setCurrentStatus(1, 0, 0, 0, 0, 0, 0, BUZZER_INTERVALL_ROT1);
} else if (value > 5 && value < 10) {
setCurrentStatus(0, 1, 0, 0, 0, 0, 0, BUZZER_INTERVALL_ROT2);
} else if (value > 10 && value < 15) {
setCurrentStatus(0, 0, 1, 0, 0, 0, 0, BUZZER_INTERVALL_GELB1);
} else if (value > 15 && value < 20) {
setCurrentStatus(0, 0, 0, 1, 0, 0, 0, BUZZER_INTERVALL_GELB2);
} else if (value > 20 && value < 25) {
setCurrentStatus(0, 0, 0, 0, 1, 0, 0, BUZZER_INTERVALL_GELB3);
} else if (value > 25 && value < 30) {
setCurrentStatus(0, 0, 0, 0, 0, 1, 0, BUZZER_INTERVALL_GRUEN1);
} else if (value > 30) {
setCurrentStatus(0, 0, 0, 0, 0, 0, 1, BUZZER_INTERVALL_GRUEN2);
}
}
void setCurrentStatus(int statusLedRot1,
int statusLedRot2,
int statusLedGelb1,
int statusLedGelb2,
int statusLedGelb3,
int statusLedGruen1,
int statusLedGruen2,
int buzzerIntervall) {
digitalWrite(ledRot1, statusLedRot1);
digitalWrite(ledRot2, statusLedRot2);
digitalWrite(ledGelb1, statusLedGelb1);
digitalWrite(ledGelb2, statusLedGelb2);
digitalWrite(ledGelb3, statusLedGelb3);
digitalWrite(ledGruen1, statusLedGruen1);
digitalWrite(ledGruen2, statusLedGruen2);
makeBeep(buzzerIntervall);
}
void makeBeep(int intervall) {
//einen Ton mit einer Frequenz von 800 Hz und einer Dauer von 45ms ausgeben.
tone(buzzer, 800, 45);
//eine Pause einlegen
//je näher das Objekt ist, desto kürzer ist der Intervall
delay(intervall);
}
float readUltrasonicValue() {
digitalWrite(trigger, LOW); //Trigger Signal ausschalten
delayMicroseconds(2); //2 ms warten
digitalWrite(trigger, HIGH); //Trigger Signal einschalten
delayMicroseconds(10); //10ms warten
digitalWrite(echo, LOW); //Trigger Signal ausschalten
float cm = pulseIn(echo, HIGH) / 58.0; //Das Empfangene Echo Signal in cm umrechnen
//Da der Sensor mit einer Messgenauigkeit von 0,3cm arbeitet können wir das
//Ergbnis auf 2 Nachkommastellen begrenzen
return (int(cm * 100.0)) / 100.0;
}
Download
Letzte Aktualisierung am: 08. März 2024

1 thought on “Einfache Einparkhilfe mit Ultraschall Abstandssensor HC-SR04, LEDs und Piezo Buzzer”