In diesem Tutorial möchte ich den 2 Achsen Joystick für den Arduino (und auch Raspberry Pi) erläutern.

Den Joystick habe ich bereits erfolgreich in dem Weekend Project: Jump’n Run auf dem Arduino eingesetzt.
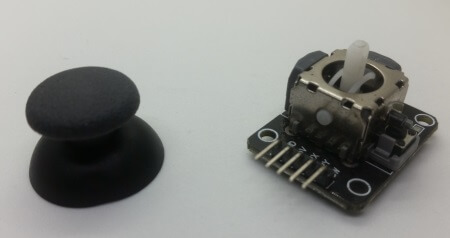
Der Joystick besteht aus 2 Teilen, einmal der Knauf und die Elektronik.

Bezug
Der Joystick kann über ebay.de* für ca. 2 € bestellt werden.
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
Technische Daten vom Joystick
- Abmaße : 33 mm x 25 mm x 33 mm (Länge x Breite x Höhe)
- Spannung: 5V
Schaltplan
Der Joystick verfügt über 5 PINs, welche wie folgt an den Arduino angeschlossen werden:
| Joystick | Beschreibung | Arduino |
|---|---|---|
| GND | Ground | GND |
| +5V | Spannungsversorgung | 5V |
| VRX | Daten der X Achse | analoger PIN A0 |
| VRY | Daten der Y Achse | analoger PIN A1 |
| SW | Status des Buttons | digitaler PIN D2 |
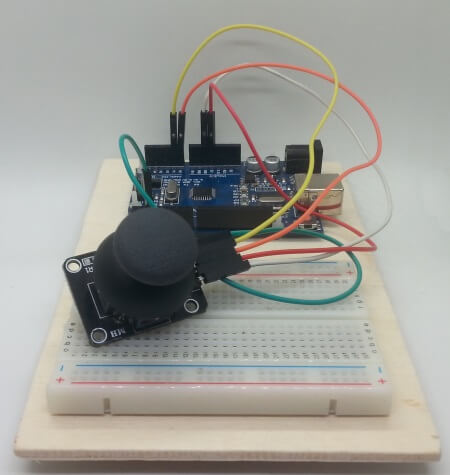
Die Schaltung würde in dem oben genannten Fall wie folgt aussehen:

Quellcode
#define joystickX A0 //X Achse des Joysticks am analogen PIN A0.
#define joystickY A1 //Y Achse des Joysticks am analogen PIN A1.
int button = 2; //Taster am digitalen PIN 2
const int PAUSE = 250; //Wert für die Pause
long lastAction = -1; //Variable zum speichern des Zeitstempels der letzten Ausführung.
void setup() {
Serial.begin(9600); //Begin der seriellen Kommunikation mit 9600baud
//Setzen des Tasters als Eingang mit dem PullUp Widerstand.
//Das Signal wird hier umgekehrt d.h. LOW == HIGH und HIGH == LOW
pinMode(button, INPUT_PULLUP);
}
void loop() {
//Abfragen der Millisekunden seit dem der Arduino gestartet / resetet wurde.
long currentTimestamp = millis();
//Alle x Millisekunden die Were der X & Y Achse Ausgeben.
if(lastAction < (currentTimestamp-PAUSE)){
lastAction = currentTimestamp;
//Auslesen der X & Y Achse des Joysticks.
int x = analogRead(joystickX);
int y = analogRead(joystickY);
Serial.print("aktuelle Koordinaten des Joysticks (x,y): ");
Serial.print(x);
Serial.print(", ");
Serial.println(y);
}
//Auslesen des Zustandes des Taster.
if(digitalRead(button)==LOW){
Serial.println("Der Taster ist gedrück!");
}
}
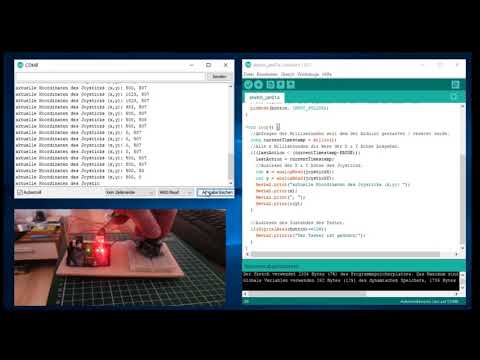
Video
Fazit
Mit dem Joystick-Modul hast du ein vielseitiges Eingabegerät kennengelernt, das sich hervorragend für interaktive Projekte eignet. Ob zur Steuerung eines Servomotors, zur Navigation in Menüs oder als Grundlage für ein einfaches Spiel – die Einsatzmöglichkeiten sind vielfältig. In dieser Lektion hast du gesehen, wie einfach sich die analogen Werte auslesen und weiterverarbeiten lassen.
Im nächsten Beitrag zeige ich dir, wie du mit dem Joystick einen Servomotor steuerst – ideal, um beispielsweise eine Kamera oder einen Roboterarm präzise auszurichten. Schau also bald wieder rein!
Letzte Aktualisierung am: 07. Juni 2025

handelt es sich nun um einen 2 achsen joystick oder 3 achsen? Da oben 3 achsen steht jedoch unter dem bild 2 achsen steht.
Hi,
danke für die Frage, es ist wirklich „nur“ ein 2 Achsen Joystick.
Gruß,
Stefan Draeger
Hallo Hr. Draeger, wird bei der Lektion 38 der Cursor auf dem Bildschirm gesteuert?
Beim Video sieht man nur die sich ändernden Daten. Ich möchte den Thumb Stick als Mouse zur Bedienung der Bildschirmoberfläche einer CNC Maschine nutzen.
Herzlichen Dank für Ihre Antwort
Gruß
Georg Strasser
Hallo Herr Strasser,
Sie können diesen kleinen Joystick mit Hilfe eines Arduino Leonardo als Maus-Ersatz nutzen.
Der Leonardo hat den Vorteil das dieser als USB HUD dient und Maus / Tastaturbefehle an den Host (in diesem Fall ein Computer) senden kann.
Gruß,
Stefan Draeger
hallo ich versuche einen roboter mit 6 servos über 3 solcher joysticks zu steuern das problem ist, dass sobald ich den joystick loslasse die servos auf die uhrsprungsposition zurükck fahren. Sie sollen aber bleiben bis ich die position erneut verändere da es sonst schwer wird den roboterarm richtig zu bedienen.
kann mir da jemand weiterhelfen
Gruss tobias schoch
Hi,
du kannst das recht einfach machen, indem du der letzte maximale Joystick-Position als Variable speicherst und wenn diese erhöht wird, wird diese wiederum ersetzt.
Gruß
Stefan Draeger