Der Calliope Mini 3 verfügt über eine echte H-Brücke, mit welcher man zwei Motoren separat steuern kann. Dieses ist ein deutlicher Vorteil zur Vorgängerversion, denn dort konnte man die Motoren immer nur gleich laufen lassen.

Im Beitrag DIY-Freude: 2WD Auto von Grund auf aufbauen habe ich dir erläutert, wie man ein 2WD aufbaut. Hier soll es nun darum gehen, wie du dieses mit dem Calliope Mini 3 steuern kannst.



Vorbereiten des 2WD Chassis für den Calliope Mini 3
Am 2WD Chassis findest du zwei DC-Motoren, an welche wir noch zwei Drähte anlöten müssen. Hier sind die Farben rot für Plus und schwarz für Minus im Vorteil. Da jedoch die Motoren je nach Polung der Spannung sich in unterschiedliche Richtungen drehen ist es zunächst eigentlich egal wo du welchen Draht anschließt.
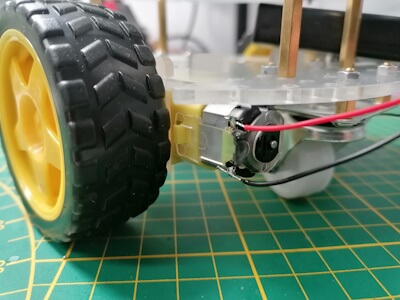
Anschlusspaneele für die Litzen

Von den beiden DC-Motoren und vom Batteriehalter kommen 6 Litzen insgesamt, diese müssen mit dem Calliope Mini verbunden werden. Dafür habe ich mir auf einer Lochrasterplatine 6 Schraubklemmen und ebenso drei
2er-Buchsenleisten aufgelötet und verbunden. Damit kann ich jetzt von diesen mit Breadboardkabel die Kontakte abgreifen und in die Buchsenleiste des Calliope Mini 3 stecken.
Montage des Calliope Mini auf der Acrylplatte
Mein 2WD Chassis hat zwei Acrylplatten, auf diese kann ich ganz einfach mit Kabelbinder diesen befestigen. Dazu stecke ich einen Kabelbinder durch einen Schlitz und schiebe auf diesen zwei weitere so das ich einen Abstand zwischen der Platte und dem Mikrocontroller erhalte.


Diesen gewonnenen Abstand benötigen wir, damit die Breadboardkabel / Jumperkabel in die Buchsenleiste eingesteckt werden können.
Programmieren der DC-Motoren in MakeCode am Calliope Mini 3
Nachdem wir die Motoren an den Mikrocontroller angeschlossen haben, können wir diese in MakeCode programmieren und damit unser 2WD Chassis steuern.
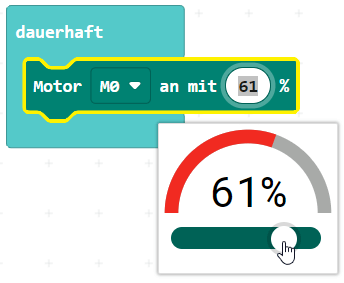
Dazu haben wir unter dem Menüpunkt „Motoren“ einen Block über welchen wir den Motor 1 „M0“ und Motor 2 „M1“ vorwärts (positiver Zahlenwert) und rückwärts (negativer Zahlenwert) fahren lassen können.
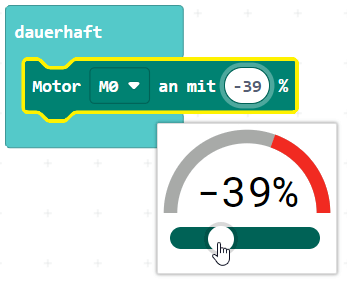
Wie erwähnt können wir am neuen Calliope Mini 3 die Motoren separat in eine Richtung steuern und können somit engere Kreise ziehen, da wir einen Motor vorwärts und den anderen parallel dazu rückwärts laufen lassen können.
In dem Video läuft ein kleines einfaches Programm, welches immer abwechselnd den linken & rechten Motor auf positiv 61 % laufen lässt und den anderen dann auf negativen 61 %.

Fazit & Ausblick
Um nun das kleine 2WD Auto autonom fahren zu lassen, bedarf es noch an einigen Sensoren wie Ultraschallsensor oder für die Linienverfolgung eines Helligkeitssensors. Wie du diese programmierst, zeige ich dir jedoch in separaten Beiträgen auf diesem Blog.
Letzte Aktualisierung am: 06. Oktober 2025
