In diesem Beitrag stelle ich dir den „Pan Tilt Bausatz“ vor und zeige dir wie einfach es ist diesen zusammenzubauen. Dem Bausatz „Pan Tilt Bausatz“ liegen 2x 9 g Servomotoren bei, welche jeweils über Gelenke miteinander verbunden sind.
Bezug
Den Bausatz kann man bei ebay.de* oder amazon.de* bestellen.
Wobei man wieder einmal den besten Preis bei ebay.de für ca. 6 € inkl. Versandkosten bekommt.
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
Lieferumfang
Zum Lieferumfang des Bausatzes gehören
- 2x 9 g SG90 Servomotoren,
- 4x Gehäuseteile

Leider fehlt dem Bausatz eine Anleitung, somit muss man sich wieder einmal an Bildern im Internet bedienen.
ODER man befolgt folgender Anleitung 🙂
Benötigtes Werkzeug zum Aufbauen
Anders als wie bisher bekannte Bausätze benötigt man hier etwas mehr Werkzeug als nur einen kleinen Schraubdreher und einen Engländer.
- Bügelsäge,
- Schlüsselfeilen Set,
- kleiner Kreuzschraubendreher,
- ggf. eine Pinzette für die kleinen Schrauben
Ein passendes Pinzetten-Set gibt es für einen schmalen Taler im Mäc Geiz, Thomas Phillips, Tedi um die Ecke. Die Preise sind um ein Vielfaches günstiger als bei Ebay.de. Bei dem Kreuzschraubendreher, Schlüsselfeile und Bügelsäge empfehle ich etwas mehr Geld auszugeben, denn sonst hat man nicht lange was von diesen Werkzeugen.
Und natürlich eine Unterlage auf welcher man den Bausatz aufbauen kann.
Haben wir das Werkzeug bereitgelegt, so können wir mit dem Aufbau beginnen. Ich schütte immer alle Teile in eine kleine, flache Schale, sodass die Teile nicht quer über den Tisch liegen.
Aufbauanleitung
Die nachfolgende Anleitung habe ich mir aus den Bildern im Internet erstellt und ist für genau diesen Bausatz passend, solltest du einen anderen Bausatz haben kann hier ggf. zu Abweichungen kommen.
Schritt 1 – Ruderhorn auf die Bodenplatte montieren
Die Ruderhörner, welche den Servomotoren mitgeliefert werden passen, nicht in die Bodenplatte, also müsste man nun entweder das Ruderhorn kürzen oder dem Ring der Bodenplatte eine Aussparung verpassen.
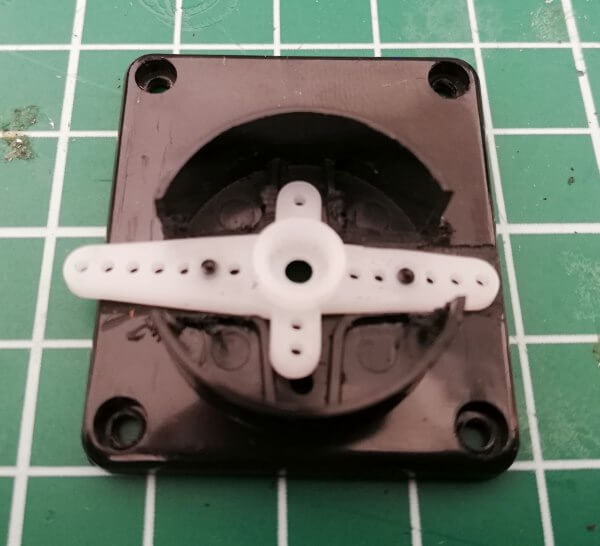
Auf das Ruderhorn wird jetzt einer der Servomotoren montiert. Dazu wird dieser in die Öffnung gesteckt. Der Servomotor wird mit einer kleinen Schraube mit dem Ruderhorn verbunden.

Schritt 2 – Montage des Ruderhorns für den 2. Servo
Das Ruderhorn für den 2. Servomotor passt leider nicht in die Aussparung des Gehäuseteiles. Daher muss hier auch entweder das Ruderhorn gekürzt oder die Aufnahme etwas modifiziert werden. Auch hier habe ich mit einer Schlüsselfeile die Wulst abgefeilt und somit passte das Ruderhorn perfekt hinein.
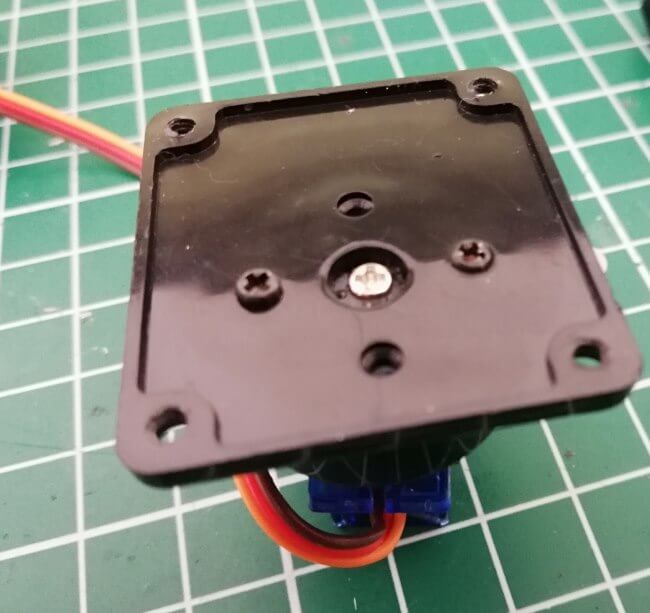
Schritt 3 – Montage des Gehäuses für den 2. Servo
Nachdem nun der Servomotor an die Bodenplatte und das Ruderhorn am Gehäuse montiert wurde, wird das Gehäuse für den zweiten Servomotor angebracht.
Dazu wird das Gehäuseteil 1 (mit dem Ruderhorn) mit der Nut auf den Servo gesteckt.
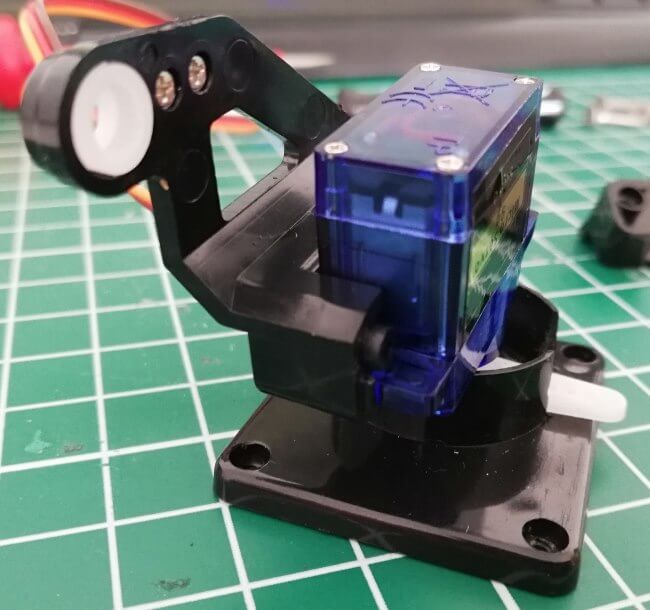
Das zweite Teil des Gehäuses wird wie das erste auch auf den Servo gesteckt und rastet hörbar in das erste Gehäuseteil ein.
Schritt 4 – Montage des 2. Servos
Der zweite Servo wird in das Ruderhorn gesteckt und mit der zweiten kleinen Schraube (siehe Schritt 1) montiert.

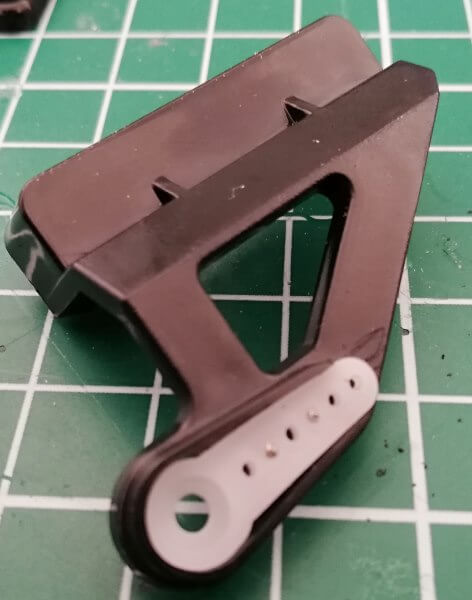
Schritt 5 – Montieren der Platte für die Kamera
Der Pan Tilt Bausatz dient eigentlich zum Bewegen eines Kameramoduls, welches in einem extra Gehäuse sitzt. Dieses Kameramodul ist nicht Bestandteil des Bausatzes und muss einzeln erworben werden.
Die Platte für das Kameramodul verfügt über einen Schenkel mit einem Loch sowie zwei kleinere für die Montage am 2. Servo.
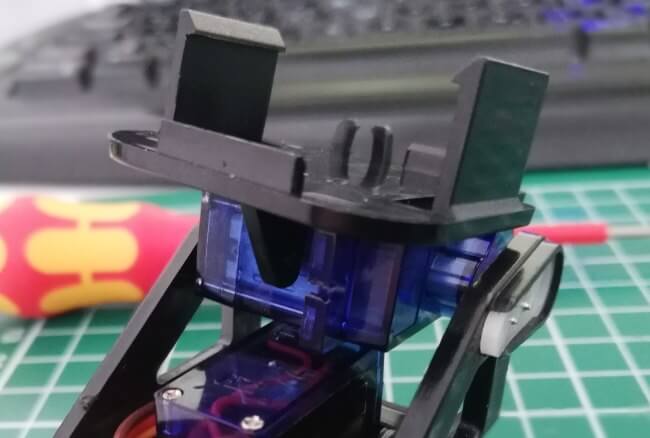
Befestigt wird diese Platte mit zwei von 4 Schrauben welche eine kleine Spitze haben.

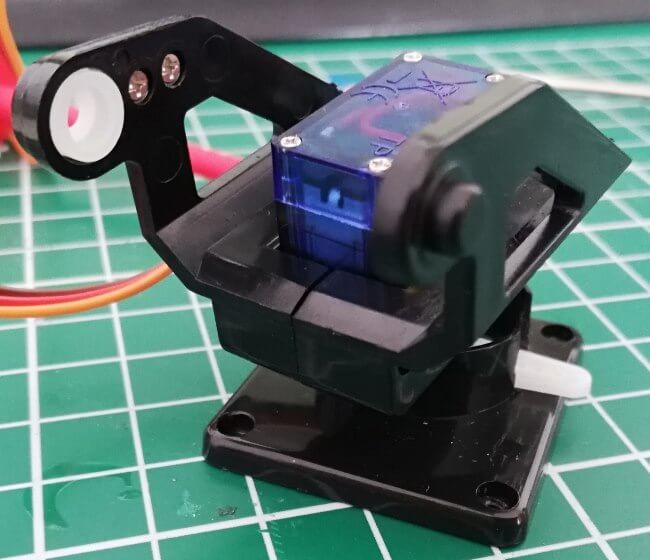
Schritt 6 – verschrauben der Gehäuseteile
Zum Schluss werden nun noch die Gehäuseteile verschraubt.

Fertig
Nachdem alles montiert wurde ist der Bausatz fertig („Macht Sinn oder!?“).

Bausatz fertig montiert
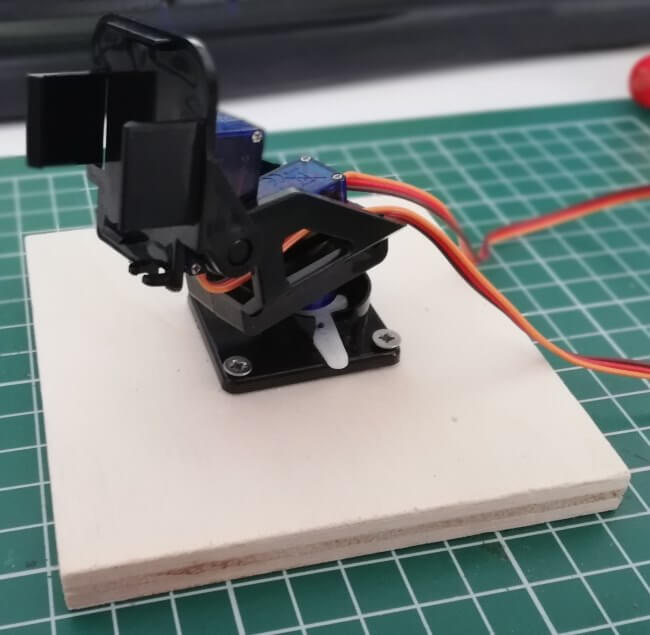
Steuern des Bausatzes mit dem Arduino
Der Bausatz ist etwas Kopflastig, daher habe ich diesen auf eine kleine (10 cm x 10 cm) Platte geschraubt.
Der Bausatz verfügt über 2 Servomotoren, wie man einen Servomotor am Arduino UNO betreibt habe ich bereits im Tutorial Arduino, Lektion 16: Servo ansteuern.
Der Bausatz kann mit einem Arduino UNO wie folgt gesteuert werden.
#include <Servo.h> //Bibliothek zum ansteuern von Servo
Servo servoUnten;
Servo servoOben;
//Pause zwischen den Schritten.
const int waitTime = 25;
void setup() {
//Setzen dass, der Servomotor "unten" am
//digitalen Pin 9 angeschlossen ist.
servoUnten.attach(9);
//Setzen dass, der Servomotor "oben" am
//digitalen Pin 10 angeschlossen ist.
servoOben.attach(10);
servoUnten.write(0);
servoOben.write(0);
}
void loop() {
for(int position = 180; position > 0; position--) {
servoUnten.write(position);
delay(waitTime); //Pause
servoOben.write(position);
}
for(int position = 0; position < 180; position++) {
servoUnten.write(position);
delay(waitTime); //Pause
servoOben.write(position);
}
}
Video zum einfachen Sketch
Steuern des Bausatzes mit einem Joystick
Der Bausatz kann mit ein paar Zeilen Code auch mit einem Joystick gesteuert werden.
Wie man die Positionen von einem Joystick ausliest, habe ich im Tutorial Arduino Lektion 38: Joystick beschrieben.
#include <Servo.h> //Bibliothek zum ansteuern von Servo
Servo servoUnten;
Servo servoOben;
#define joystickX A0 //X Achse des Joysticks am analogen PIN A0.
#define joystickY A1 //Y Achse des Joysticks am analogen PIN A1.
#define joystickButton 2 //Taster des Joysticks am digitalen PIN D2.
//Pause zwischen den Schritten.
const int waitTime = 25;
void setup() {
//Setzen dass, der Servomotor "unten" am
//digitalen Pin 9 angeschlossen ist.
servoUnten.attach(9);
//Setzen dass, der Servomotor "oben" am
//digitalen Pin 10 angeschlossen ist.
servoOben.attach(10);
//Setzen des Tasters als Eingang mit dem PullUp Widerstand.
//Das Signal wird hier umgekehrt d.h. LOW == HIGH und HIGH == LOW
pinMode(joystickButton, INPUT_PULLUP);
servoUnten.write(0);
servoOben.write(0);
}
void loop() {
//Lesen der aktuellen Position des Joysticks.
int x = analogRead(joystickX);
int y = analogRead(joystickY);
//Setzen der gelesenen Werte.
servoUnten.write(y);
//Damit die Relais nicht zuviel Stromstärke zur gleichen Zeit ziehen.
//Eine kleine Pause.
delay(waitTime); //Pause
servoOben.write(x);
}
Video

Fazit
Der Aufbau des Bausatzes ist etwas holperig da die Aufbauanleitung fehlt, jedoch nachdem studieren der Bilder im Internet war es doch erfolgreich.
Ansonsten kann ich mich nicht beschweren und der Bausatz funktioniert zuverlässig.
Letzte Aktualisierung am: 06. März 2024

Super, vielen Dank für die Anleitung, hat mir bei meinem Bausatz sehr geholfen.
2 Anmerkungen:
– Da die Servomoteren nur die angesprochenen 180° fahren können ist die Position beim Einbau unbedingt zu beachten. Ich musste beide Servos nochmal neu positionieren, um auch den gewünschten Schwenk/Neige-Bereich abdecken zu können.
– In deinem ersten Skript sollten die Schleifen-Bedingungen so aussehen würde ich sagen:
for(int position = 180; position => 0; position–)
for(int position = 0; position <= 180; position++)
Grüße
Hi,
Welche Größe haben die Schrauben um das Ruderhorn anzuschreiben? Eine genaue Bezeichnung wäre gut.
Gruß
Hi Stephan,
die Schraube zur Montage eines Ruderhorns an einem Servomotor vom Typ SG90 ist 5 mm lang (inkl. Schraubenkopf) und hat einen Durchmesser von 2mm.
Gruß,
Stefan Draeger
Hallo!
Toller Artikel.
Ich würde gern etwas ähnliches bauen, bräuchte dafür aber an einer Stelle eine 360° Drehung. Weißt du, welcher Servo dafür geeignet ist?
LG, Nora
Hallo Nora,
einen 360° Servo kannst du dir selber aus einem normalen Servo bauen. Eine Anleitung dazu findest du auf YouTube unter https://www.youtube.com/results?search_query=servo+hacking
Alternativ gibt es auch von M5Stack solche Servos, jedoch sind diese recht teuer und der Hack ist da meist günstiger.
Gruß
Stefan