Ein mini Servo kann mit wenig Zeilen Code am Arduino betrieben werden. Wie dieses gemacht wird, möchte ich nun in diesem kleinen Tutorial beschreiben.
Diesen Servo bekommst du bei ebay.de bereits ab 1,5 € zzgl. Versandkosten (besonders günstiger wird es in größeren Mengen).
Technische Daten
- Gewicht – 9g
- Betriebsspannung – 4.8V
- Umgebungstemperatur – 0 °C bis 55 °C
- Abmaße – 22,2 mm x 11,8 mm x 31 mm (LxBxH)
- Stell-Zeit – 0,1 s (60°)
- Stell-Moment – 1,8 kg cm (0,176 Nm)
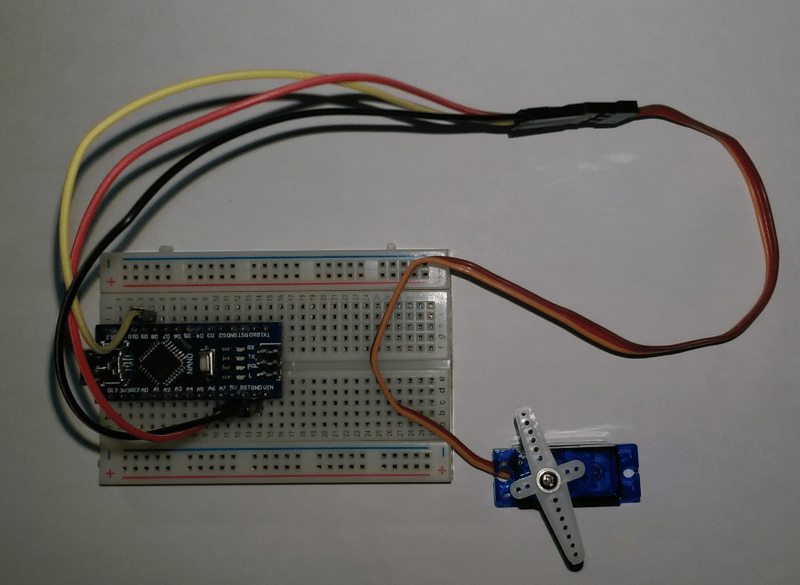
Der Schaltplan
Von dem Servo gehen 3 Kabel ab, welche wie folgt am Arduino Mikrocontroller angeschlossen werden.
- Braun – GND
- Rot – 5V
- Orange – digitaler PIN 9
Der Quellcode
In meinem Beispiel möchte ich „nur“ den Servo jeweils um 180° nach links und nach rechts bewegen. In der Arduino IDE ist die benötigte Bibliothek bereits enthalten und muss nur mit dem Befehl „include“ eingebunden werden. Diese Bibliothek hat eine Begrenzung von 8 Servos, d.h. man kann nur 8 Servo Objekte gleichzeitig initialisieren. Des Weiteren kann dieser Mini Servo „nur“ um 180° nach rechts & links bewegt werden, größere und auch leistungsfähigere Servos können größere Radien erreichen.
#include <Servo.h> //Bibliothek zum ansteuern von Servo
Servo servo; //Servo Objekt erstellen (noch nicht initialisiert)
int position = 0; //Variable zum speichern von der aktuellen Position
const int waitTime = 50; //Zeit zum pausieren zwischen den einzelnen Schritten des Servos
void setup()
{
servo.attach(9); //setzen des Servo Objektes auf den digitalen PIN 9
}
void loop()
{
//For Schleife zum drehen des Servos um 180°
for(position = 0; position < 180; position++) {
servo.write(position); //Schreiben des aktuellen Wertes der Variable 'position' (1...180)
delay(waitTime); //Pause
}
//For Schleife zum drehen des Servos um 180°
for(position = 180; position>=1; position--){
servo.write(position); //Schreiben des aktuellen Wertes der Variable 'position' (180...1)
delay(waitTime); //Pause
}
}
Das Video
Download
Fazit
In dieser Lektion hast du gelernt, wie einfach sich ein Servomotor mit dem Arduino ansteuern lässt. Mit nur wenigen Zeilen Code und einem simplen Aufbau kannst du bereits gezielte Bewegungen realisieren – perfekt für kleine Automatisierungsprojekte, Roboterarme oder Modellbau-Anwendungen.
Im nächsten Beitrag zeige ich dir, wie du den Servomotor mithilfe eines Potentiometers präzise steuern kannst. So kannst du per Drehbewegung ganz intuitiv die Position des Servos verändern. Es bleibt spannend – bleib dran!
Letzte Aktualisierung am: 07. Juni 2025

Danke
sehrgut für mich als servo NEULING erleutert werde den cod bei mir mit 6 servos
auf meinem mega testen danke