In diesem kurzen Beitrag beantworte ich zwei konkrete Fragen aus der Community zum RP2040:bit-Board, die mir als Kommentar unter meinem ursprünglichen Blogpost gestellt wurden. Ziel ist es, dir schnell und übersichtlich zu zeigen, welche GPIOs auf die Bananenstecker-Anschlüsse des Boards gelegt sind und welche Möglichkeiten es gibt, das Board alternativ zum Micro-USB-Port mit Strom zu versorgen. Der Beitrag richtet sich an alle, die das RP2040bit flexibel in eigenen Projekten oder im Bildungsbereich einsetzen möchten.

Ein herzliches Dankeschön an Anton F. für den konstruktiven Kommentar und die gezielten Fragen zum RP2040bit! Genau solche Rückmeldungen aus der Community helfen dabei, wichtige Details zu ergänzen und den Beitrag für alle Leser noch wertvoller zu machen.
Pinout & Aufbau des RP2040:bit
Um das volle Potenzial des RP2040bit-Boards auszuschöpfen, lohnt sich ein genauer Blick auf den Aufbau und die Pinbelegung. In diesem Abschnitt zeige ich dir, wie die einzelnen GPIOs verteilt sind, welche Funktionen die Anschlüsse bieten und worauf du beim Anschluss von Sensoren oder Aktoren achten solltest. So behältst du stets den Überblick – egal ob im Experimentieraufbau oder beim Einsatz mit Erweiterungsmodulen.

Der RP2040bit orientiert sich nicht nur im Formfaktor am bekannten BBC micro:bit, sondern bietet auch eine kompatible Belegung der Schneidklemme (Edge Connector). Dadurch lassen sich viele Erweiterungen und Zubehörteile, die für den micro:bit entwickelt wurden, auch problemlos mit dem RP2040bit verwenden – ein großer Pluspunkt für alle, die bereits passendes Zubehör besitzen oder auf eine breite Auswahl an Erweiterungsboards zugreifen möchten.

Features des RP2040:bit Mikrocontrollers
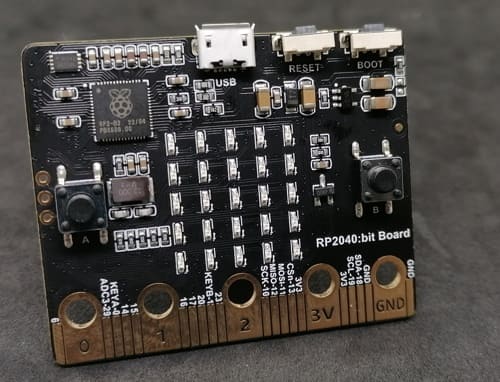
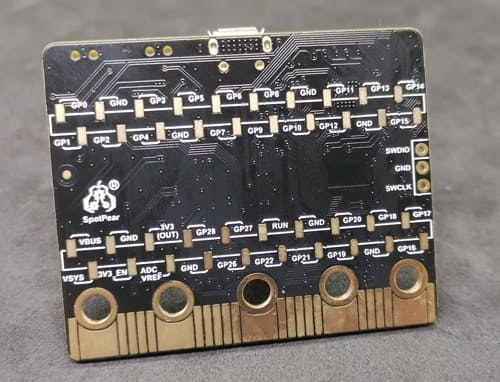
Der RP2040bit bringt alle grundlegenden Elemente mit, um direkt mit dem Programmieren loszulegen: Eine Micro-USB-Buchse zur Stromversorgung und Programmierung, zwei frei belegbare Tasten, eine 5×5 LED-Matrix in rot sowie eine Debug-Schnittstelle auf der Rückseite. Darüber hinaus bietet das Board zahlreiche GPIO-Pins – sowohl über die Schneidklemme (Edge Connector) als auch über zusätzliche Lötpunkte auf der Rückseite.
Im Vergleich zum BBC micro:bit fällt auf, dass der RP2040bit auf zusätzliche Sensoren wie Kompass, Beschleunigungssensor oder Bluetooth verzichtet. Wer diese Funktionen benötigt, ist mit dem micro:bit besser ausgestattet. Für reine GPIO-Projekte oder zum Einstieg in die RP2040-Welt bietet der RP2040bit jedoch eine solide Basis mit großem Potenzial.
Alternative Stromversorgung
Der einfachste Weg, den RP2040bit mit Strom zu versorgen, ist über die Micro-USB-Buchse. Du kannst dazu ein USB-Netzteil, eine Powerbank oder auch deinen PC verwenden.
Falls in deinem Projekt jedoch keine USB-Stromversorgung möglich ist, lässt sich der Mikrocontroller auch über eine externe Spannungsquelle betreiben. Nutze hierfür den VSYS-Pin auf der Rückseite des Boards. An diesem Pin kannst du eine Spannung zwischen 1,8 V und 5,5 V einspeisen.

🔋 Meine Empfehlung: Verwende eine stabile 5V-Spannungsquelle – damit konnte ich den RP2040bit im Test zuverlässig betreiben.
⚠️ Wichtig: Wenn die Stromversorgung über VSYS erfolgt, steht am VBUS-Pin keine 5V-Spannung mehr zur Verfügung. Du kannst darüber dann keine externen Komponenten mehr mitversorgen.

Betrieb des RP2040:bit über eine externe Stromversorgung
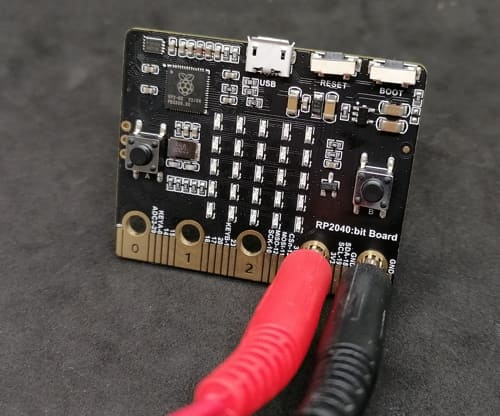
Um zu zeigen, dass der RP2040bit auch ohne USB-Verbindung zuverlässig läuft, habe ich eine einfache Schaltung mit einer blinkenden LED aufgebaut. Die Besonderheit: Die Stromversorgung erfolgt nicht über die Micro-USB-Buchse, sondern über eine externe 5V-Spannungsquelle, die direkt am VSYS-Pin angeschlossen wird. Ideal eignet sich hierfür ein Batteriefach mit 3× AA-Batterien.
Für den Aufbau der Schaltung verwende ich folgende Komponenten:
- einen RP2040:bit Mikrocontroller*
- ein 400-Pin Breadboard*
- ein Power-Supply-Modul* für Breadboards
- ein Batterieclip für 9V Block Batterie*, mit Jack Adapter
- zwei 5 mm LEDs*
- zwei 220 Ohm Vorwiderstände* für die LEDs
- vier Breadboardkabel*, männlich – männlich
- zwei Prüfkabel mit Krokoklemmen*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
Die LED wird über einen Vorwiderstand an GPIO 26 angeschlossen und blinkt im Sekundentakt. Damit lässt sich sehr gut demonstrieren, dass der RP2040bit auch autark und mobil betrieben werden kann – ideal für Projekte ohne festen USB-Anschluss oder für den Einsatz unterwegs.
- 🔧 Wichtig: Der Mikrocontroller wird weiterhin über die Micro-USB-Buchse programmiert. Achte darauf, dass während des Programmierens die externe Stromquelle vom VSYS-Pin getrennt ist, um Schäden an Board oder Computer zu vermeiden.

Quellcode für das Wechselblinken zweier LEDs am RP2040:bit Mikrocontroller
💾 Hinweis zur Ausführung beim Start
Damit der Code automatisch beim Einschalten des RP2040bit ausgeführt wird – also auch ohne Verbindung zum PC oder manuelles Starten über die Entwicklungsumgebung – muss das Skript als boot.py (oder alternativ als main.py) auf dem Mikrocontroller gespeichert werden.
In diesem Fall speichern wir das Blink-Beispiel als boot.py. So startet das Programm sofort, wenn der Mikrocontroller über die externe Stromquelle (z. B. über den VSYS-Pin) mit Spannung versorgt wird – ganz ohne USB-Verbindung oder Benutzerinteraktion.
✅ Tipp: In Thonny, Mu Editor oder rshell kannst du die Datei direkt auf dem Dateisystem des RP2040bit speichern. Achte darauf, dass du bestehende
boot.pyodermain.py-Dateien ggf. überschreibst oder sicherst.
# Importiere das 'time'-Modul, um Pausen im Programm einzubauen
import time
# Importiere die 'Pin'-Klasse aus dem 'machine'-Modul zur Steuerung der GPIOs
from machine import Pin
# Initialisiere GPIO 26 als Ausgang (für grüne LED)
ledGruen = Pin(26, Pin.OUT)
# Initialisiere GPIO 27 als Ausgang (für rote LED)
ledRot = Pin(27, Pin.OUT)
# Endlosschleife: LEDs abwechselnd ein- und ausschalten
while True:
ledGruen.value(1) # Schalte grüne LED ein
ledRot.value(0) # Schalte rote LED aus
time.sleep(0.5) # Warte 0,5 Sekunden
ledGruen.value(0) # Schalte grüne LED aus
ledRot.value(1) # Schalte rote LED ein
time.sleep(0.5) # Warte 0,5 Sekunden
Letzte Aktualisierung am: 13. Februar 2026
