In diesem Beitrag möchte ich dir zeigen wie du den Ultraschall Abstandssensor HC-SR04 am ESP32 programmierst und betreibst.
Den ESP32 habe ich bereits im Beitrag Microcontroller ESP32 – LOLIN32 vorgestellt.
Bezug der benötigten Resourcen für den Aufbau der Schaltung „Ultraschall Abstandssensor HC-SR04 am ESP32“
Für den Nachbau dieses Beitrages benötigst du folgende Komponenten:
- einen ESP32*,
- ein Micro-USB Datenkabel*,
- einen Ultraschall Abstandssensor HC-SR04*,
- ein 400 Pin Breadboard*,
- ein 170 Pin Breadboard*,
- ein Power Modul für das Breadboard*,
- fünf 10cm Breadboardkabel, männlich – männlich*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
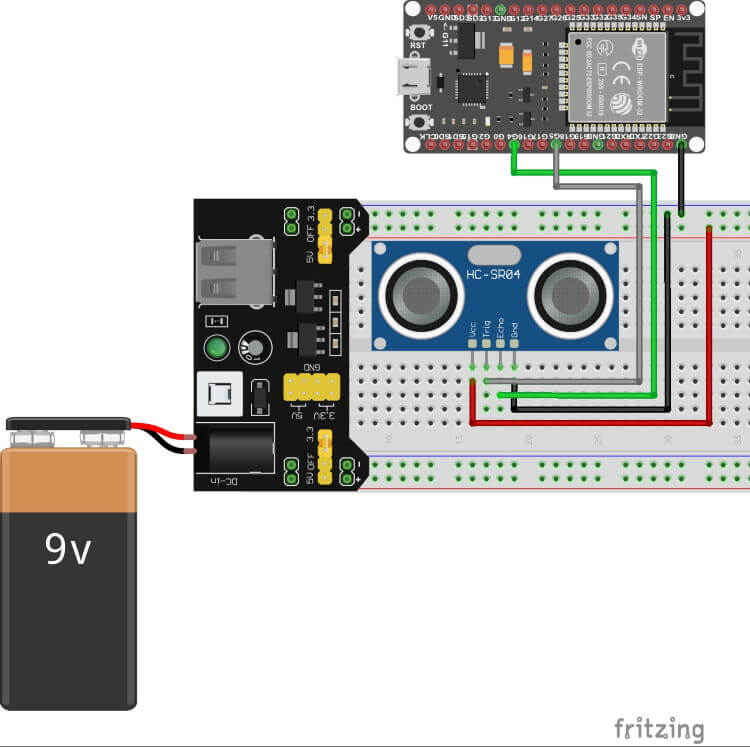
Aufbau der Schaltung
Für den Aufbau der Schaltung benötigst du lediglich 5 kleine Breadboardkabel. Es ist dabei darauf zu achten, dass ein gesondertes GND / Minus Kabel vom Breadboard an den Mikrocontroller erfolgt, dieses dient dem Potentialausgleich.
Der Ultraschall Abstandssensor benötigt 5V an VCC daher benutzen wir das Power-Modul für das Breadboard mit 9V Blockbatterie. Der TRIGGER Pin wird an den GPIO05 und der ECHO Pin an den GPIO04 angeschlossen und GND vom Modul an den Minuspol des Breadboards.
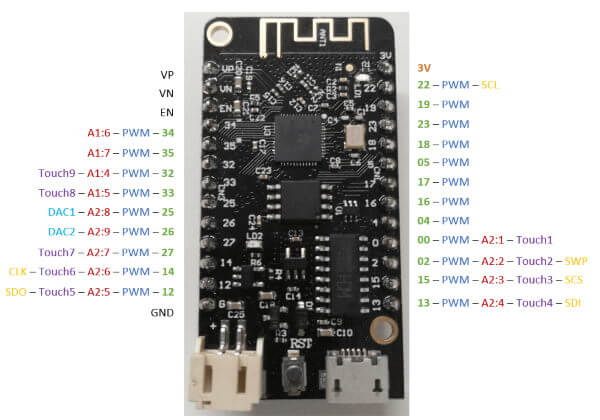
Pinout des ESP32
Programmieren
Damit wir die Ultraschall Daten empfangen und in Zentimeter umrechnen können, benötigen wir 3 kleine Bibliotheken um die GPIO Pins anzusprechen bzw. um eine Pause von wenigen Mikrosekunden einlegen zu können.
Schauen wir uns zunächst den Quellcode Stück für Stück an.
Als ersten kommen hier die Imports der bereits erwähnten Module.
import machine from utime import sleep_us, ticks_us from time import sleep
Danach definieren wir die Pins für TRIGGER & ECHO. Wenn du die Schaltung so wie oben gezeigt aufgebaut hast dann ist der TRIGGER Pin auf GPIO05 & der ECHO Pin auf GPIO04.
Der TRIGGER Pin muss als Ausgang und der ECHO Pin als Eingang definiert werden.
trigger=machine.Pin(5, machine.Pin.OUT) echo=machine.Pin(4, machine.Pin.IN)
Da wir kontinuierlich die Daten empfangen und auf der Konsole ausgeben möchten, starten wir nun eine Endlosschleife.
while True:
Zunächst stellen wir sicher das der TRIGGER ausgeschaltet ist. Danach legen wir eine Pause von 2 Microsekunden ein und aktivieren diesen Pin erneut.
Nachdem der TRIGGER Pin wieder aktiviert ist wir eine Pause von 10 Microsekunden eingelegt und der Pin wieder deaktiviert.
trigger.off() sleep_us(2) trigger.on() sleep_us(10) trigger.off()
Im ersten Schritt der Endlosschleife haben wir 2 Signale über den TRIGGER Pin abgesendet welche wir nun über den ECHO Pin empfangen wollen.
Dazu warten wir nun solange bis der ECHO Pin auf HIGH ist und merken uns die Microsekunden des Signals. Danach warten wir nun solange bis der ECHO Pin wieder auf LOW ist und merken uns auch diese Microsekunden.
while echo.value() == 0: pass ticks1 = ticks_us() while echo.value() == 1: pass ticks2 = ticks_us()
Zum Schluss müssen wir diese beiden Zeiten nur voneinander Subtrahieren und durch den Wert 58.0 teilen. Somit haben wir die Zentimeter mit 3 Nachkommastellen als Ergebnis.
Diesen Wert geben wir nun auf der Konsole aus und machen eine Pause von 2 Sekunden.
cm = (ticks2 - ticks1) / 58.0 print(cm, " cm") sleep(2)
Hier nun der komplette Quellcode:
import machine
from utime import sleep_us, ticks_us
from time import sleep
trigger=machine.Pin(5, machine.Pin.OUT)
echo=machine.Pin(4, machine.Pin.IN)
while True:
trigger.off()
sleep_us(2)
trigger.on()
sleep_us(10)
trigger.off()
while echo.value() == 0:
pass
ticks1 = ticks_us()
while echo.value() == 1:
pass
ticks2 = ticks_us()
cm = (ticks2 - ticks1) / 58.0
print(cm, " cm")
sleep(2)
Video
Letzte Aktualisierung am: 09. März 2024
