In diesem Tutorial möchte ich den Microcontroller Nano V3.0 Strong vorstellen.
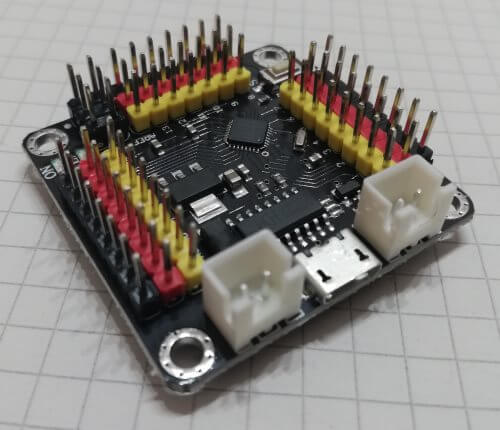
Der Mikrocontroller hat mich gereizt, da dieser über mehrere VCC & GND verfügt, diese sind meist nur 1x auf dem „normalen“ Mikrocontroller vorhanden. Doch bei diesem Board ist es so dass, jeder der digitalen 14 Pins und analogen 8 Pins über jeweils einmal VCC & GND verfügt. Das Rastermaß ist hier 2,54 mm und somit kann man zbsp. einen Servomotor darauf stecken (per DuPont Stecker). Aber zu den Anwendungsbeispielen kommen wir weiter unten.
Bezug
Das Nano V3.0 Strong Board kann man bei ebay.de* für knapp 3,50 € inkl. Versandkosten aus China bestellen. (Bei einigen Verkäufern gibt es einen Rabatt, wenn man mehr als eines erwirbt.)
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
Technische Daten des Nano V3.0 Strong Microcontroller
Da als Grundlage für dieses Board der „normale“ Arduino Nano mit dem ATmega328P Chip dient sind die technischen Daten identisch.
| Microcontroller | ATmega328P |
| Flash Speicher | 32 KB (2 KB in Benutzung vom Bootloader) |
| SRAM | 2 KB |
| Geschwindigkeit | 16 MHz |
| analoge Pins | 8 |
| digitale Pins | 14 |
| PWM Pins | 6 (D3, D5, D6, D9, D10, D11) |
| max. Stromaufnahme pro IO Pin | 40 mA |
| Stromverbrauch | 19 mA |
Neben der bekannten Mini USB Buchse (der Arduino Nano verfügt über eine Micro-USB Buchse) welche zum Upload eines Sketches auf den Mikrocontroller dient, verfügt der Mikrocontroller auch über zwei zusätzliche Buchsen an welche einmal eine Spannungsversorgung von 7 bis 16 Volt angeschlossen werden kann und an der anderen eine Spannung von 3,3V abgegriffen werden kann. Diese beiden Buchsen sind auf der Rückseite des Mikrocontrollers entsprechend beschriftet.

einrichten in der Arduino IDE
Der Nano Strong ist wie bereits erwähnt vom Chip her ein einfacher Arduino Nano. In der Arduino IDE muss man neben dem Port (welcher individuell vom Computer gesetzt werden muss) auch den Bootload auf „ATmega328P (Old Bootloader)“ einstellen.

Beispiele
Servomotor
Da der Nano Strong wie bereits beschrieben über mehrere VCC & GND verfügt wollen wir zunächst einen Servo über diesen steuern. Wie man einen Servomotor ansteuert habe ich bereits im Tutorial Arduino, Lektion 16: Servo ansteuern ausführlich beschrieben.
Je nach verwendetem Servomotor können große Ströme auftreten, welche ggf. den Nano Strong zerstören können. Ich verwende in diesem Beispiel Servomotoren vom Typ „9G – SG90“.

Diese Servomotoren können für knapp 4 € über ebay.de erworben werden. (Einen großen Rabat erhält man jedoch wenn man 10 Stück oder mehr bestellt.)
Sketch
#include <Servo.h> //Bibliothek zum ansteuern von Servo
Servo servo; //Servo Objekt erstellen (noch nicht initialisiert)
#define DREHPOTI A0 //Drehpotentiometer am analogen Pin A0
//Variable zum speichern des letzten gelesenen Wertes
int lastValue = -1;
void setup(){
servo.attach(9); //setzen des Servo Objektes auf den digitalen PIN 9
}
void loop(){
//lesen des aktuellen Wertes vom Drehpotentiometer
int value = analogRead(DREHPOTI);
//Nur wenn der Wert sich geändert hat soll der Servo in
//der Position verändert werden.
if(value != lastValue){
lastValue = value; //überschreiben des letzten gelesenen Wertes
int servoPosition = map(value,0,1023,0,180);
servo.write(servoPosition); //setzen der aktuellen Servo Position
}
}
Video
Fazit
Ein guter und vor allem kleiner Mikrocontroller mit sehr vielen Anschlussmöglichkeiten.
Durch die beiden Buchsen für jeweils Eingangs und Ausgangsspannung hat dieser den Vorteil, dass man noch einfacher einen LiPo Akku anschließen kann. Hier muss man jedoch etwas mehr in die Tasche greifen als beim Mikrocontroller selber, denn diese kosten (wenn man einen guten mit einer ordentlichen Leistung haben will) deutlich mehr als die 5 €.
Letzte Aktualisierung am: 06. März 2024
