In diesem Beitrag möchte ich dir den Mikrocontroller WeAct Studio Pico vorstellen und zeigen, wie dieser programmiert wird.
Dieser Mikrocontroller verfügt über einen RP2040 Chip, welchen ich dir bereits am original Raspberry Pi Pico vorgestellt habe (siehe Raspberry PI Pico #1 – Vorstellung)
Kaufen eines WeAct Studio Pico
Den mir vorliegenden Mikrocontroller habe ich auf aliexpress.com für 6 € zzgl. Versandkosten erstanden.
Lieferumfang
Dem WeAct Studio Pico liegen zwei 20 Pin Stiftleisten und eine 4 Pin Stiftleiste bei.

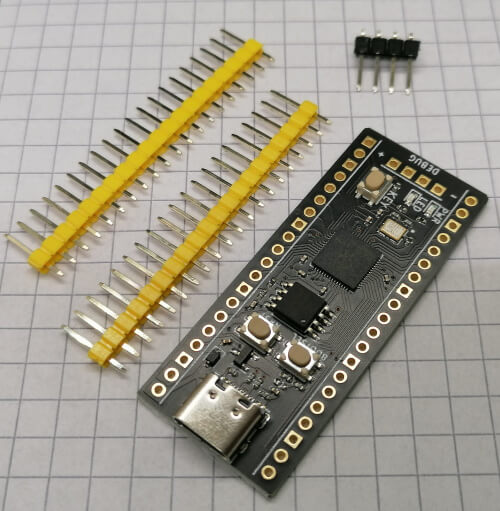
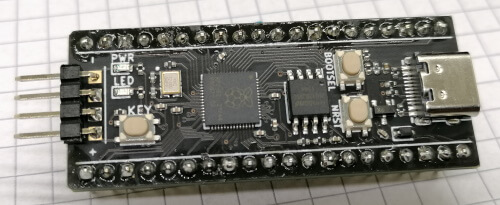
Aufbau des Mikrocontrollers
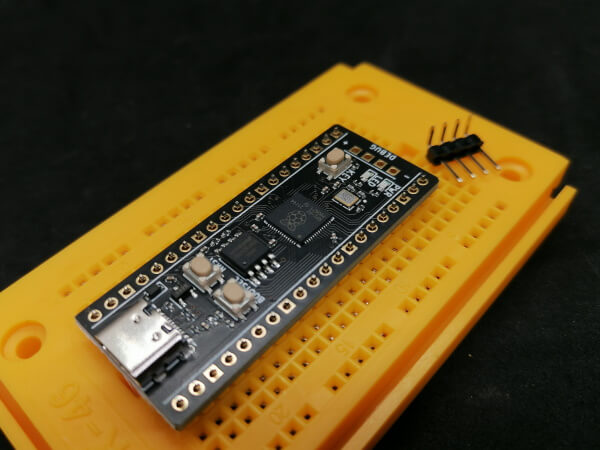
Bevor man den Mikrocontroller in Schaltungen verwenden kann, müssen die Stiftleisten angelötet werden.
Ich benutze hierfür immer ein Breadboard, da dann die Stiftleisten in einem sauberen Winkel angelötet werden kann.
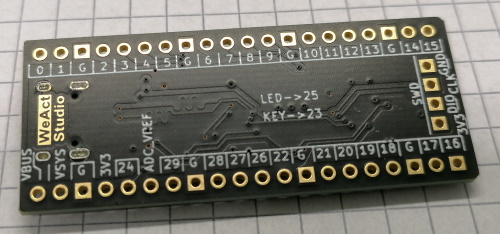
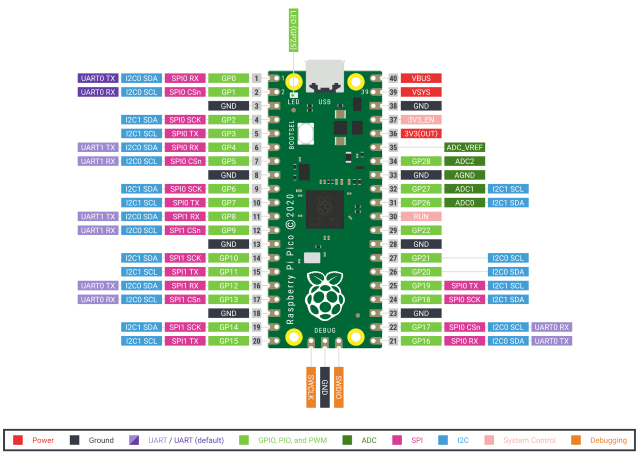
Pinout des Mikrocontrollers
Der Mikrocontroller ist dem Raspberry Pi Pico / Pico W sehr ähnlich und auch die Pins sind an den gleichen Stellen. Diese Eigenschaft macht es dir sehr leicht dein derzeitiges Projekt, welches ggf. etwas groß geworden ist und mehr Speicher benötigt, zu erweitern.
technische Daten des WeAct Studio Pico
Hier nun die technischen Daten des Mikrocontrollers:
| Microcontroller | RP2040 dual-core Cortex-M0+ mit 133 MHz (Übertaktbar bis 250 MHz) |
| Speicher | 264 KB SRAM 16 MB QSPI Flash Speicher |
| Schnittstellen | 1x Typ-C USB 1.1, 2x UART, 2x I²C, 2x SPI 4 Pin Arm serieller Debug Port |
| Erweiterungen | 2x 20 Pin 2,54 mm Stiftleisten 28 GPIOs, 3x 12-bit ADC (bis zu 500 Kbps), 16x PWM |
| Spannungsversorgung | 5 V über USB, oder 2 bis 5 V über Pin VSYS |
| Abmaße (L x B) | 53 mm x 21,5 mm |
Programmieren
MU-Editor zum Programmieren
Zum Programmieren nutze ich die einfache Entwicklungsumgebung Mu-Editor. Dieses Tool kannst du unter https://codewith.mu/ für Microsoft Windows, macOS und Linux herunterladen.
Wenn du das Tool zum ersten Mal startest, dann kann dieses etwas dauern, da noch einige Ressourcen aus dem Internet nachgeladen werden.
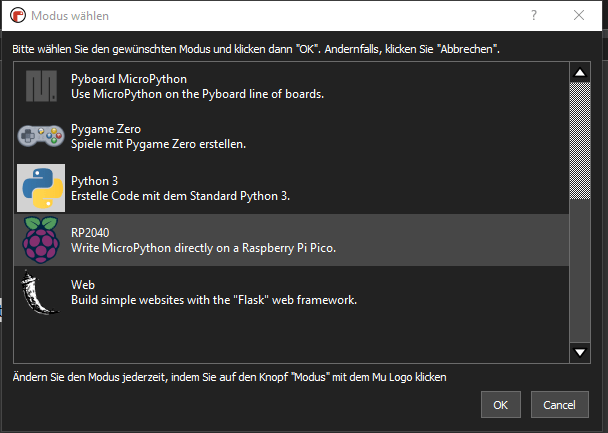
Wenn die IDE nun endlich gestartet ist, dann müssen wir den Modus wählen. Da unser Mikrocontroller eigentlich vom Typ RP2040 ist, wählen wir den Eintrag „RP2040“ aus der Liste (siehe Grafik).
Wenn wir jetzt das kleine Skript mit der Ausgabe von „Hello World!“ in einem Intervall von 10 Sekunden ausführen, erhalten wir nachfolgende Ausgabe.
import time
while True:
print("Hello World!")
time.sleep(10)
In der Ausgabe können wir zusätzliche Informationen zum angeschlossenen Board auslesen. In meinem Fall ist es ein „Pimoroni Pico LiP 16MB with RP2040“.
MicroPython v1.17 on 2021-12-01; Pimoroni Pico LiPo 16MB with RP2040
Type "help()" for more information.
>>>
>>>
>>>
>>>
raw REPL; CTRL-B to exit
>OK
MPY: soft reboot
Traceback (most recent call last):
File "_boot.py", line 9, in <module>
KeyboardInterrupt:
raw REPL; CTRL-B to exit
>OK
Hello World!Kleines Beispiel
Da wie erwähnt der hier vorgestellte Mikrocontroller mit dem Raspberry Pi Pico baugleich ist, kann ich dir leider keine speziell abgestimmten Beispiele zeigen, denn dieser hat ja lediglich mehr Speicher.
Wir können also größere Projekte bauen oder mehr Daten sammeln und diese im Speicher ablegen.
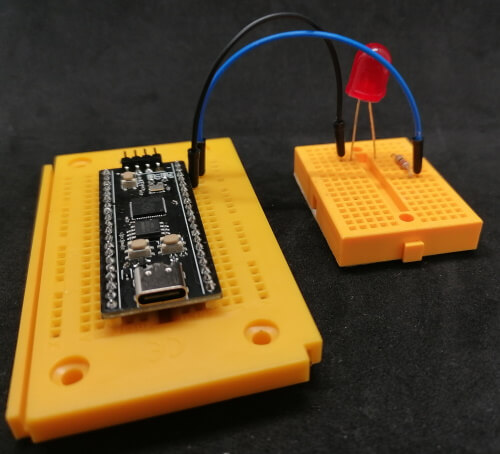
LED blinken
Als erstes kleines Beispiel möchte ich eine LED zum Blinken bringen.
Hierfür benötigst du:
- den Mikrocontroller WeAct Studio Pico,
- ein USB-Typ-C Datenkabel*,
- eine LED*,
- ein 220 Ohm Widerstand*,
- zwei Breadboardkabel*,
- ein 270 Pin Breadboard*, und ein 170 Pin Breadboard*, oder
- ein 800 Pin Breadboard*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
import time
#wird benötigt um die GPIOs anzusteuern
from machine import Pin
#die LEDs sind auf dne GPIOs 01 bis 07
led = Pin(15, Pin.OUT)
while True:
led.value(1)
time.sleep(0.5)
led.value(0)
time.sleep(0.5)
Flashen für die Programmierung in CirtuitPython
Auf der Seite https://circuitpython.org/board/weact_studio_pico/ kannst du ein Flash-File für den Mikrocontroller herunterladen. Damit du diese Datei auf den Mikrocontroller kopieren kannst, musst du diesen in einen speziellen Modus starten, dazu trennst du diesen zunächst von einer aktiven Verbindung zum Computer und hältst die Taste „BOOT“ auf dem Mikrocontroller gedrückt und baust die Verbindung erneut wieder auf.
Wie das gemacht wird, habe ich dir bereits im Beitrag zum Raspberry Pi Pico gezeigt (jedoch wird hier von CircuitPython auf MicroPython gewechselt) https://draeger-it.blog/raspberry-pi-pico-1-vorstellung/#aufspielen_einer_neuen_Firmware_fuer_Micropython.
In meinem Fall hat der geöffnete Mu-Editor erkannt, dass ein Mikrocontroller mit CircuitPython angeschlossen wurde und möchte den derzeit gewählten Modus ändern.
Wenn der Vorgang abgeschlossen ist, kannst du nachfolgendes Script nutzen, um deine LED erneut zum Blinken zu bringen.
import time
import board
import digitalio
led = digitalio.DigitalInOut(board.GP15)
led.direction = digitalio.Direction.OUTPUT
while True:
led.value = True
time.sleep(0.5)
led.value = False
time.sleep(0.5)
Letzte Aktualisierung am: 10. März 2024
