Den Grove – Rotary Angle Sensor von Seeedstudio habe kostenfrei für ein Review von Seeedstudio.com zur Verfügung gestellt bekommen.
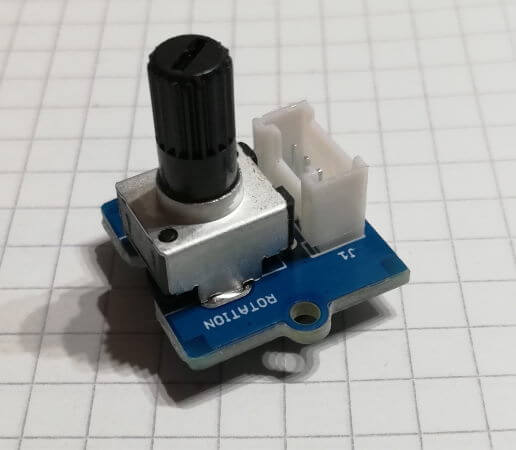
Der Sensor ist ein 10 kOhm Drehpotentiometer, welcher über einen analogen Pin am Mikrocontroller angeschlossen wird. Zum Lieferumfang gehört neben dem Sensor ein Anschlusskabel sowie eine kleine Beschreibung zum Sensor.



Aufbau
Was mir sofort aufgefallen ist, ist das der Stecker der Grove Schnittstelle im gleichen Winkel wie der Drehknopf ist. D.h. beide zeigen nach oben. Dieses finde ich sehr unglücklich gewählt, denn, wenn man diesen Sensor in ein Gehäuse einbauen möchte, muss man die Kabel knicken.

Bezug
Den Rotary Angle Sensor kann man über den Online Shop von Seeedstudio.com für derzeit 2,90 $ (ca. 2,62 €) beziehen. (exkl. Versandkosten)
Technische Daten des Rotary Angle Sensors
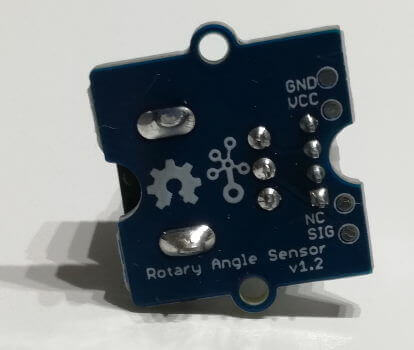
Der Sensor ist ein 10kOhm Drehpotentiometer welcher über die Grove Schnittstelle an zbsp. den Seeeduino Nano angeschlossen werden kann. Der Sensor kann bis max. 300 Grad gedreht werden, wobei 0 Grad gleich dem analogen Wert 0 entspricht und 300 Grad dem analogen Wert 1023 (0..1023). Der Stromverbrauch des Sensors ist dabei minimal.
Schaltung
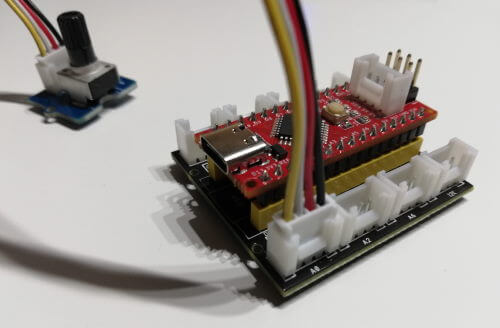
Eine Schaltung mit dem Sensor ist durch die Grove Schnittstelle schnell aufgebaut. Durch den speziellen Stecker und die Buchse kann das Kabel nicht falsch eingesteckt werden.
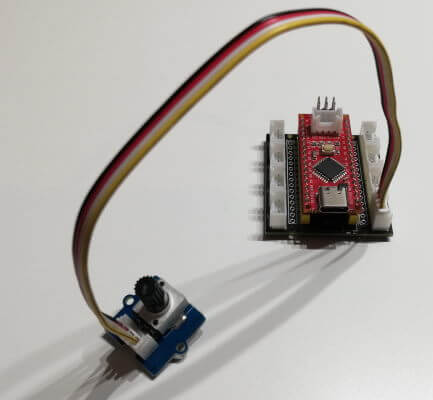
Der Sensor wird an eine analoge Schnittstelle angeschlossen. Wenn das Board Seeeduino Nano mit dem Grove Shield verwendet so hat man 3 analoge Schnittstellen zur Verfügung.
Quellcode
Im nachfolgenden möchte ich 3 kleine Projekte mit dem Sensor zeigen.
Beispiel I – auslesen des aktuellen Wertes
Als Erstes wollen wir die Daten des Sensors auslesen, dazu nutzen wir die Funktion „analogRead“, dieser Funktion müssen wir zusätzlich die Pinbezeichnung übergeben an welchem der Sensor angeschlossen wurde.
//Sensor am analogen Pin A0 angeschlossen
#define pin A0
void setup() {
//beginn der seriellen Kommunikation
Serial.begin(9600);
}
void loop() {
//lesen des aktuellen Wertes des Sensors
int value = analogRead(pin);
//Ausgeben des Wertes auf der seriellen Schnittstelle
Serial.println(value);
}
Video
Beispiel II – steuern der Helligkeit einer LED
Für das Steuern der Helligkeit einer LED muss man das digitale PWM Signal manipulieren. Der Seeeduino Nano verfügt über mehrere solcher PWM Pins. Wenn man jedoch wie ich den Seeeduino Nano mit dem I/O Grove Shield verwendet, so hat man leider nur einen PWM Pin zur Verfügung (D6).
//Sensor am analogen Pin A0 angeschlossen
#define pin A0
//rote LED am digitalen Pin D6 (PWM)
#define ledRot 6
void setup() {
//beginn der seriellen Kommunikation
Serial.begin(9600);
}
void loop() {
//lesen des aktuellen Wertes des Sensors
int value = analogRead(pin);
Serial.print("[");
//ausgeben des Wertes auf dem seriellen Monitor
Serial.print("RAS:");Serial.print(value);
//ermitteln des PWM Wertes,
//das analoge Signal reicht von 0 bis 1023,
//das digitale PWM Signal von 0 bis 255
int brightness = map(value,0,1023,0,255);
//ausgeben des Wertes für die Helligkeit auf dem seriellen Monitor
Serial.print(", brightness:");Serial.print(brightness);
Serial.println("]");
//setzen der Helligkeit
analogWrite(ledRot, brightness);
}
Video

Beispiel III – steuern des Intervalls zweier blinkenden LEDs
Mit dem analogen Wert des Sensors kann man nun eine Pause steuern (0 sek. bis 1023 sek.). Diese Pause dient als Intervall zum Blinken zweier LEDs.
//Sensor am analogen Pin A0 angeschlossen
#define pin A0
//rote LED am digitalen Pin D2
#define ledRot 2
//blaue LED am digitalen Pin D4
#define ledBlau 4
//Variable für die Pause
int pause = 250;
void setup() {
//beginn der seriellen Kommunikation
Serial.begin(9600);
}
void loop() {
//lesen des aktuellen Wertes des Sensors
//und überschreiben des letzen Wertes für
//die Pause
pause = analogRead(pin);
//blinken der roten LED
blink(ledRot);
//blinken der blauen LED
blink(ledBlau);
}
//Funktion zum aufblinken einer LED am
//digitalen Pin
void blink(int pin){
//aktivieren der LED
digitalWrite(pin, HIGH);
//eine Pause einlegen
delay(pause);
//deaktivieren der LED
digitalWrite(pin, LOW);
//eine Pause einlegen
delay(pause);
}
Video
Montageplatte aus dem 3D Drucker
Auf der Internetplattform Thingiverse.com findet man zu den Grove Shields auch einige Montageplattformen, diese sind sehr gut geeignet um die Sensoren in Gehäuse oder auf Platten sicher zu montieren.

Letzte Aktualisierung am: 01. Mai 2023
