In diesem Beitrag möchte ich dir den Metallroboterarm-Kit für den BBC micro:bit von der Firma Waveshare vorstellen.

Das hier vorgestellte Kit habe ich kostenfrei von der Firma anzado GmbH für diesen Beitrag erhalten. Im Shop findest du das Set unter Waveshare 4-DOF Metall Roboter Arm für Micro:Bit mit Bluetooth für derzeit knapp 70 € zzgl. Versandkosten.
Lieferumfang des Metallroboterarm-Kit
Zum Lieferumfang des Metallroboterarm-Kit gehört:
- drei kleine Micro-Servos (Typ WS-MG90S),
- ein großer Servo (Typ WS-MG996R),
- zwei Kreuzschraubendreher,
- diverse Schrauben und Abstandshalter aus Messing,
- ein 5 V, 3 A Netzteil mit Micro-USB Anschluss,
- eine Adapterplatine für den BBC micro:bit,
- Konstruktionsmaterial für den Metallroboterarm













Was in diesem Kit fehlt ist der Mikrocontroller BBC micro:bit, dieser kann zbsp. auf ebay.de für knapp 25 € zzgl. Versandkosten erstanden werden.
Benötigtes Werkzeug für den Aufbau
Dem Kit liegen zwei kleine Kreuzschraubendreher bei, jedoch habe ich für den Aufbau noch ein paar weitere Werkzeuge benutzt, welche das ganze etwas einfacher gestaltet hat:
- 4er-Steckschlüssel*,
- 4.5er-Maulschlüssel*,
- kleine Spitzzange*,
- magnetischer Kreuzschraubendreher PH 2.0*,
- kleiner elektrischer Stabschraubendreher*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!

Das Werkzeug findest du auch des Öfteren recht günstig aber trotzdem nutzbar im Discounter wie Aldi, Lidl oder Norma.
Aufbau des Roboterarms für den BBC micro:bit
Dem Kit liegt keine Aufbauanleitung in Papierform bei. Diese findest du als Link auf dem Shop unter dem Reiter „Dokumente“ (oder hier).
Im Nachfolgenden verwende ich die englischen Bezeichnungen für die Bauteile, dieses macht es dir etwas einfacher um ggf. in der Anleitung etwas nachzuschlagen.
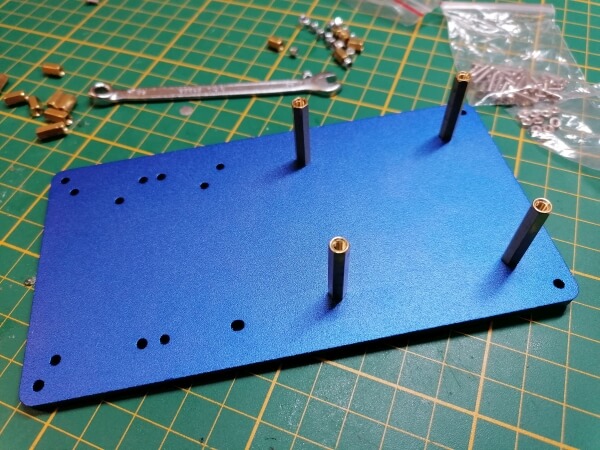
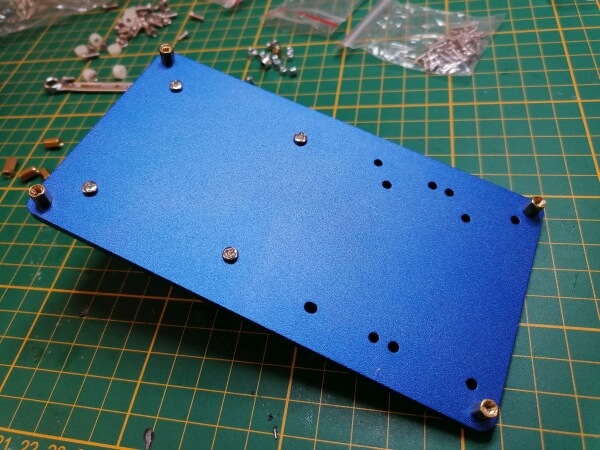
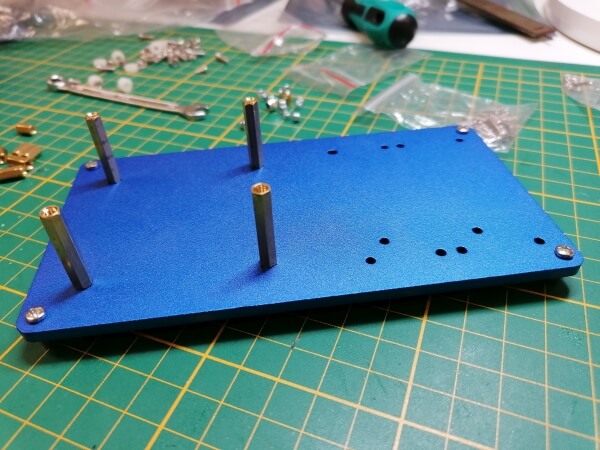
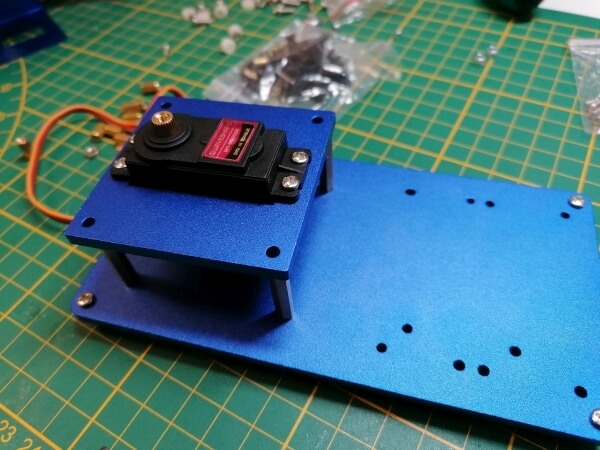
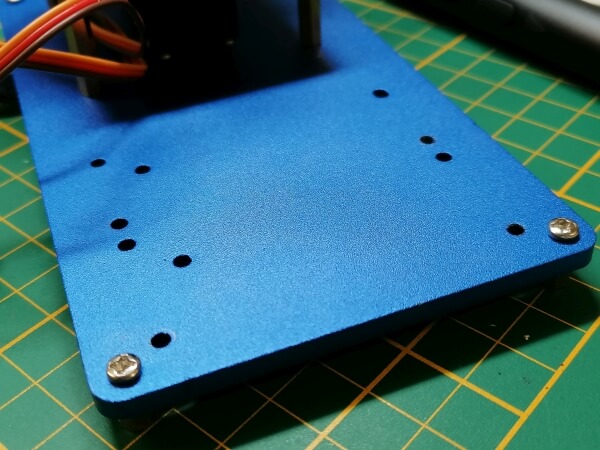
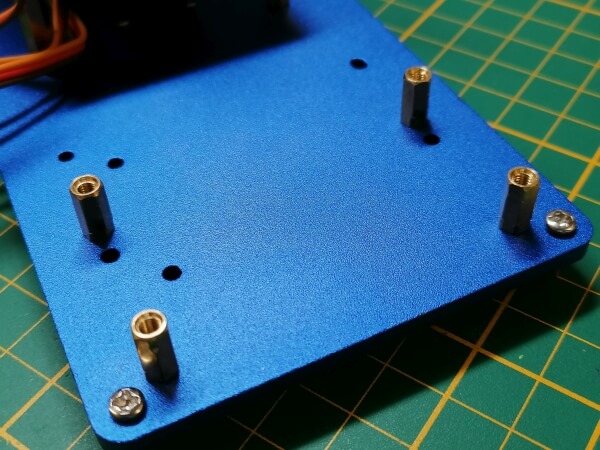
Schritt 1 – Bottom Board
Im ersten Schritt werden die 25 mm Abstandshalter an das Bottom Board geschraubt.


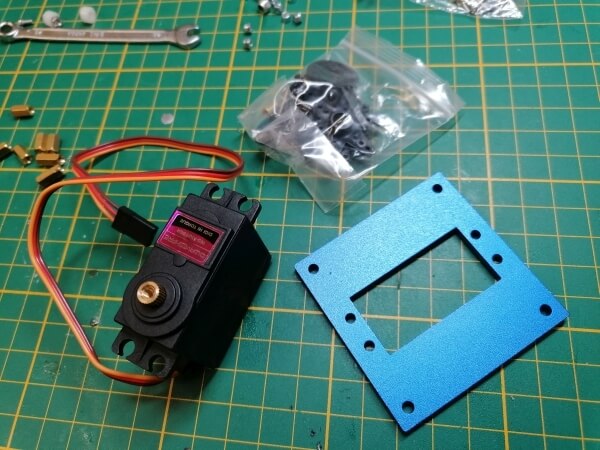
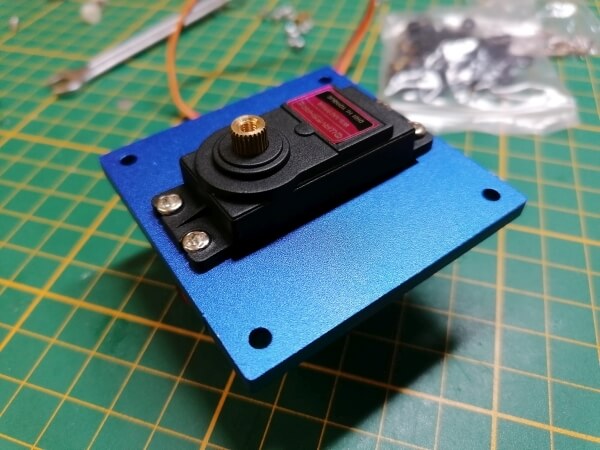
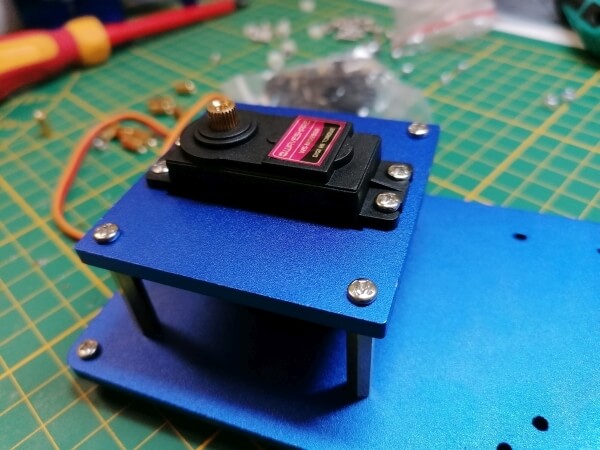
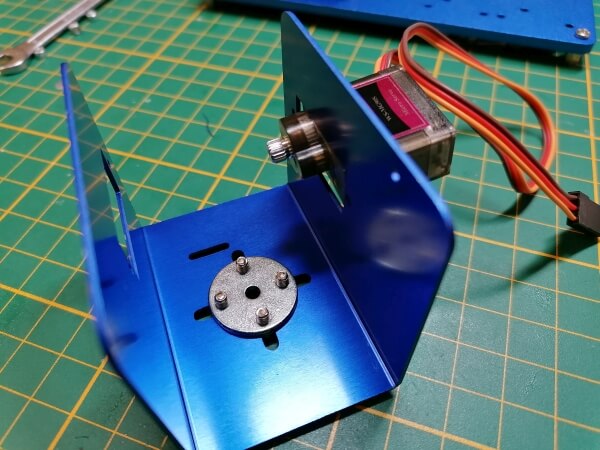
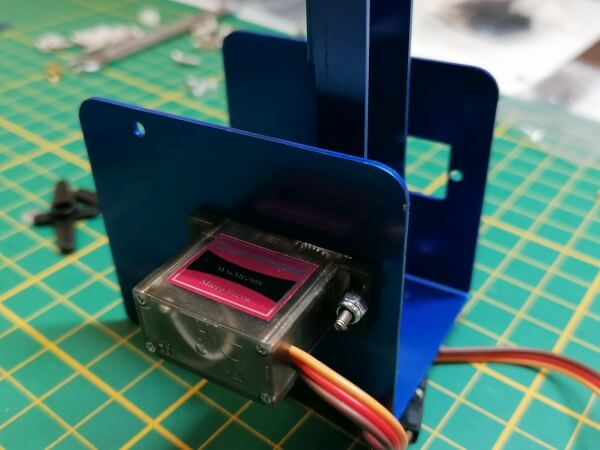
Schritt 2 – Servomotor MG996R anbauen
Der große Servomotor vom Typ MG996R wird auf die Platte geschraubt. Hier ist die Einbaurichtung nicht besonders interessant, da diese universal ist.

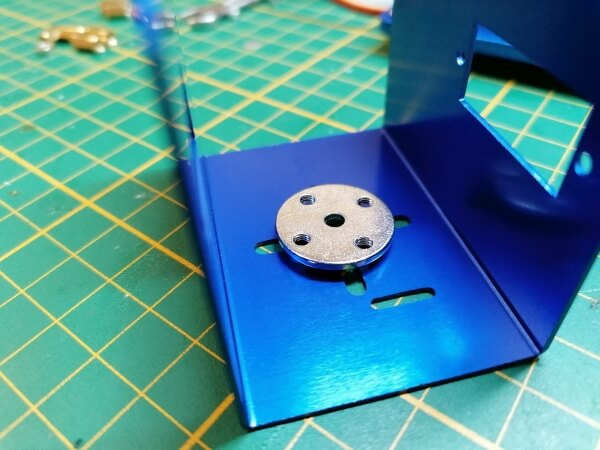
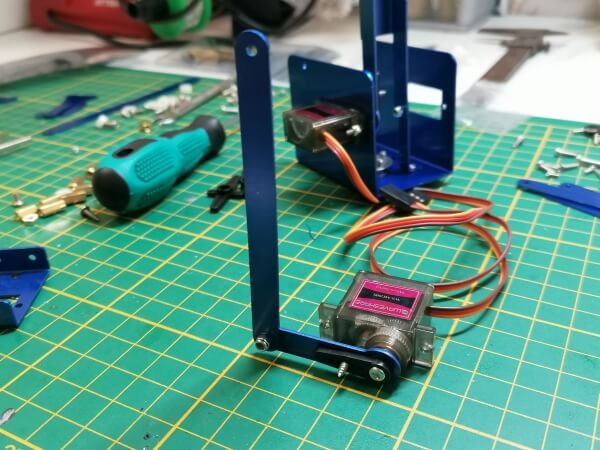
Schritt 3 – Ruderhorn & U-Type Board montieren
Das Ruderhorn für den großen Servomotor wird an das U-Type-Board montiert, hier muss darauf geachtet werden die ersten Schrauben nicht zu fest an zuzuziehen da die anderen Schrauben noch eingeschraubt werden müssen.


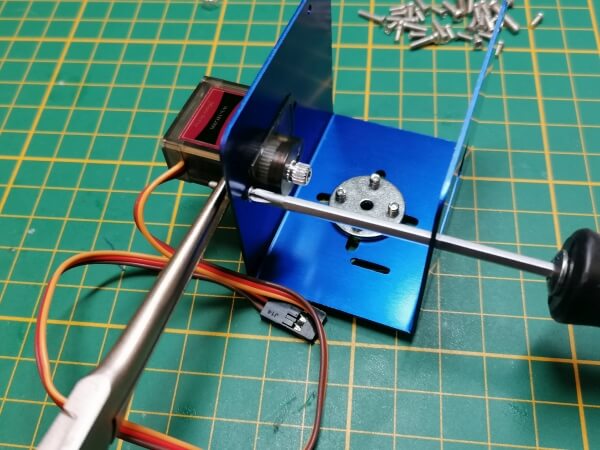
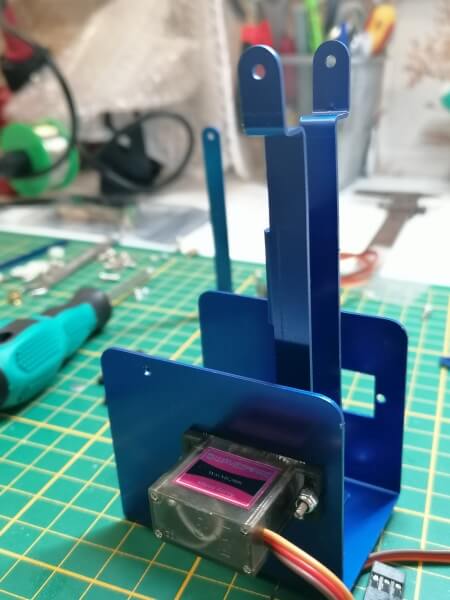
Schritt 4 – kleinen Servo,motor MG90S am U-Type Board montieren
Der erste kleine Servomotor vom Typ MG90S wird an das U-Type-Board montiert. Als Mutter muss hier eine einfache gewählt werden (das war leider in der Anleitung nicht ganz ersichtlich).


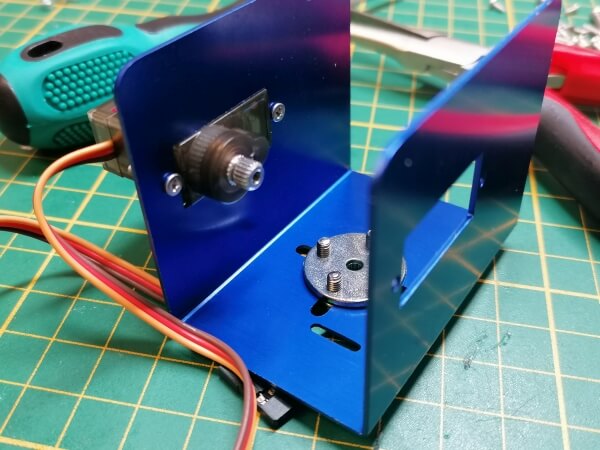
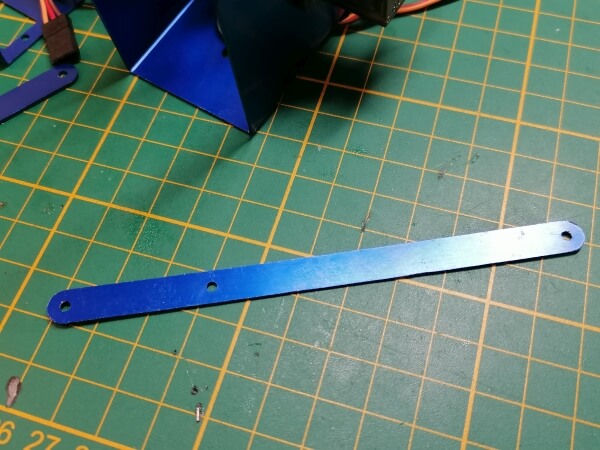
Schritt 5 – H-Type Blech am Servormotor montieren
Der untere Teil vom Arm wird an den zuvor montierten, kleinen, Servomotor angebracht. Dazu wird die Schraube in das dritte Loch im Ruderhorn geschraubt. Die andere Seite wird mit dem langen Winkel an das U-Type-Board geschraubt.



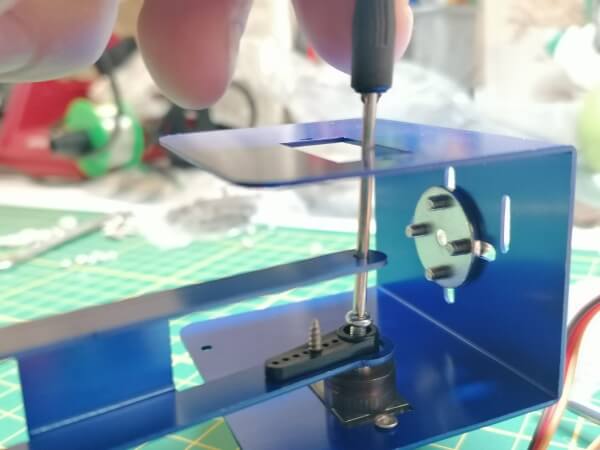



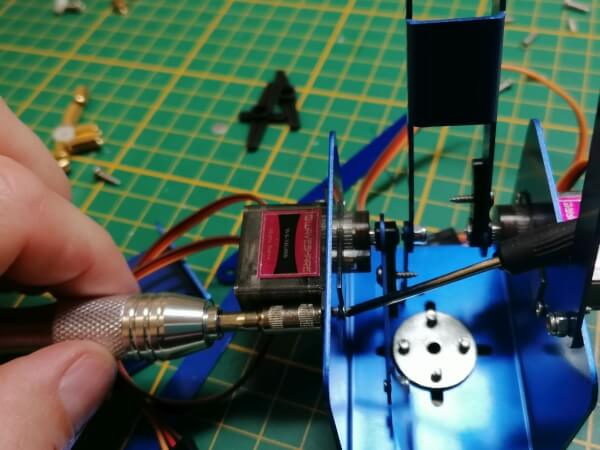
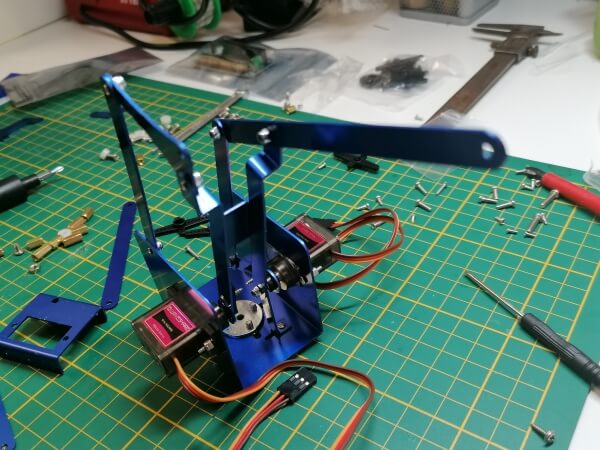
Schritt 6 – zweiten, kleinen Servomotor MG90S montieren
Der zweite kleine Servomotor wird auf die gegenüberliegende Seite montiert und genau hier kommt ein Problem „Wie setze ich den Schraubendreher an?“. In meinem Fall habe ich mir ein 4,5 mm Maulschlüssel genommen und die Schraube mit dem Schraubendreher fixiert habe und mit dem Maulschlüssel festgedreht.


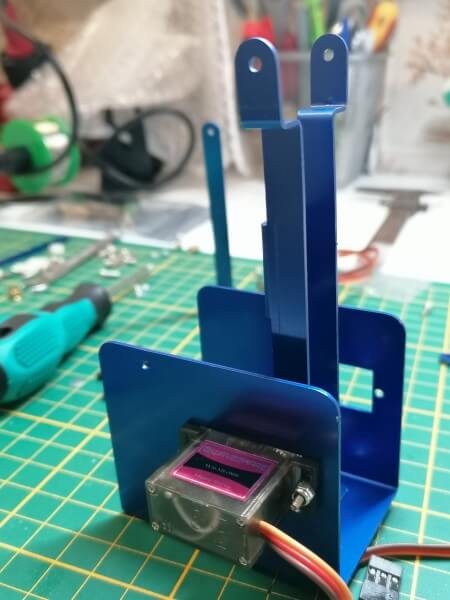
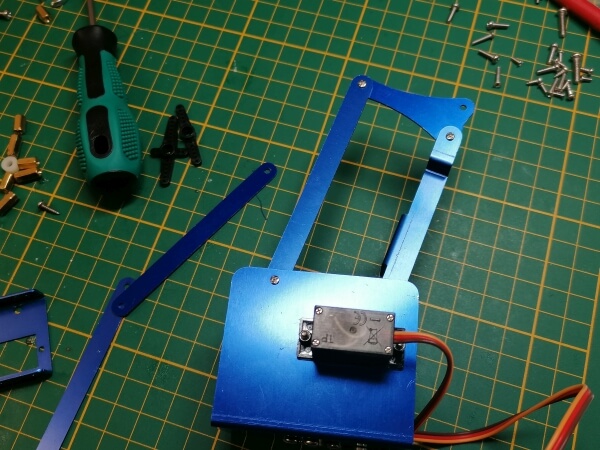
Schritt 7 – Gelenk für den Arm aufbauen
Aus den übrigen langen Blechen wird der Arm zusammengebaut.


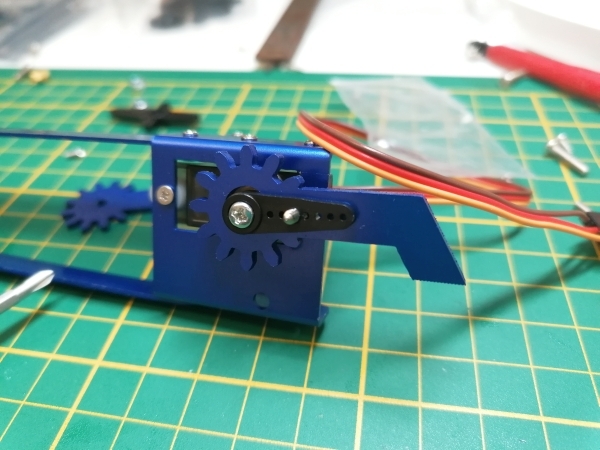
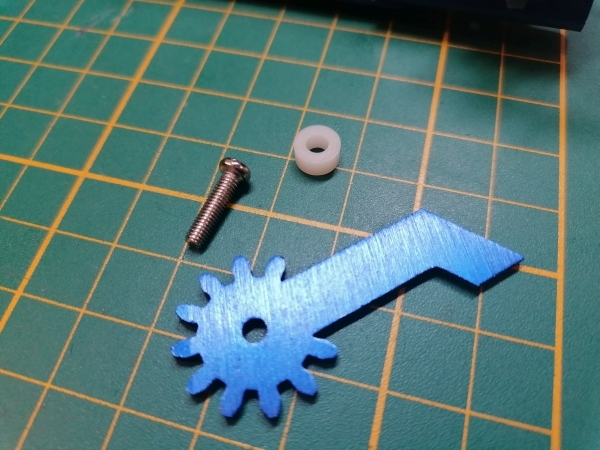
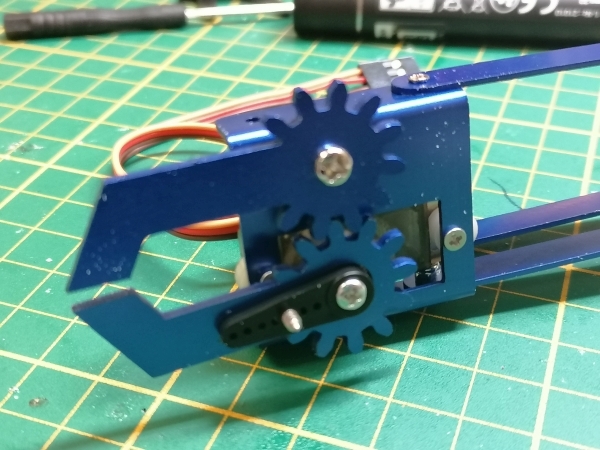
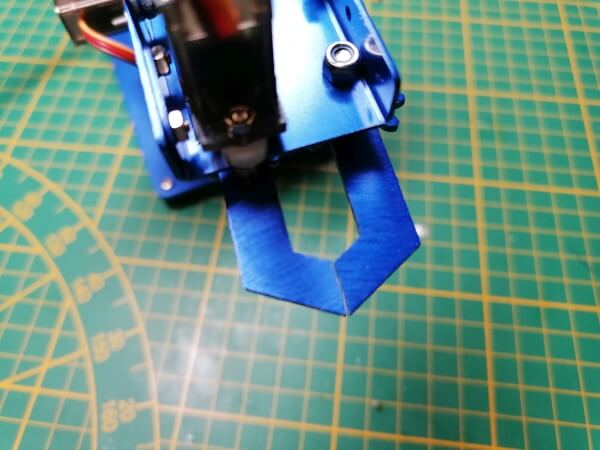
Schritt 8 – kleinen Servomotor MG90S mit Klaue aufbauen
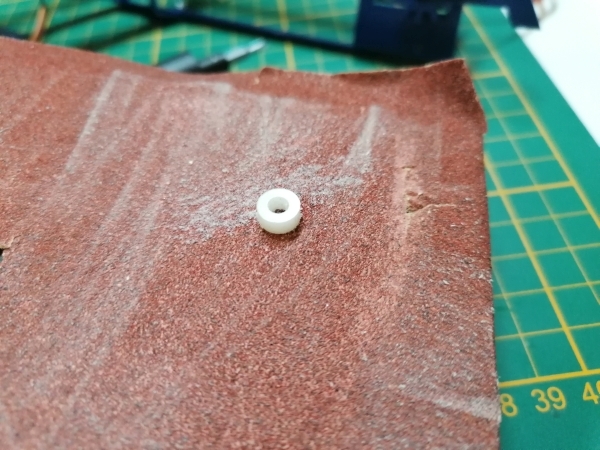
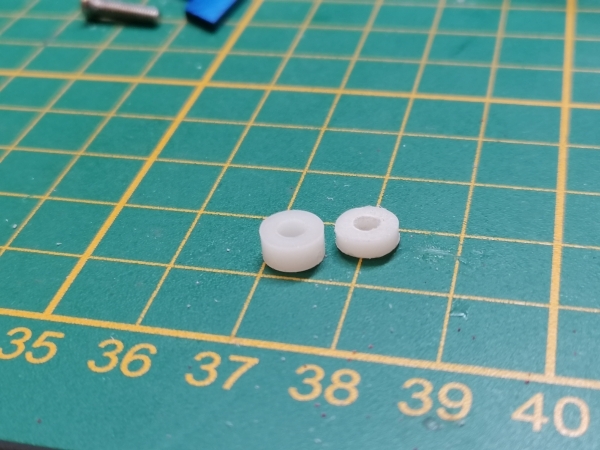
Um den Greifer aufzubauen, benötigen wir die kleinen, weißen Abstandshalter. Zwei von denen kommen unter den Servomotor und zwei sollen laut Anleitung unter den einen Arm vom Greifer geschraubt werden.
Jedoch muss dieser etwas niedriger sein (einer wäre zu niedrig), daher schleife ich diese um wenige Millimeter ab und somit greifen die Zahnräder ideal ineinander.


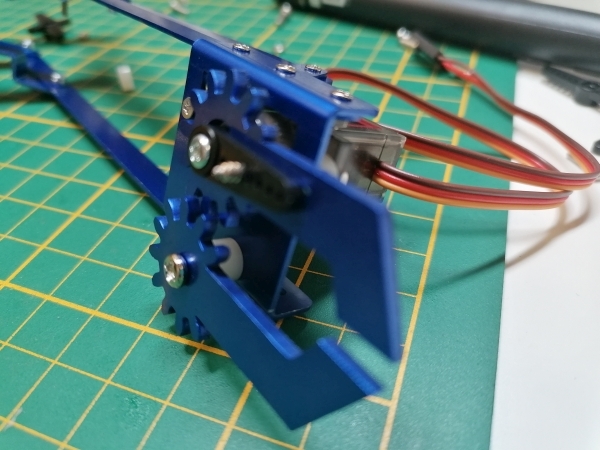
Schritt 9 – montieren U-Board an das Bottom Board
Wenn der Greifer montiert ist, können die beiden Teile (der Arm und das Bottom Board) mit einer Schraube an das Ruderhorn geschraubt werden.
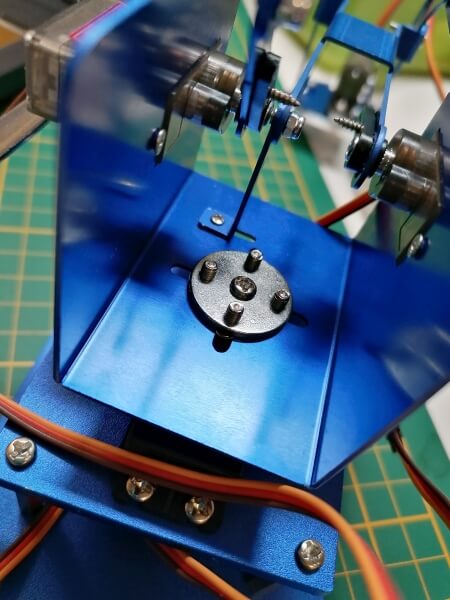
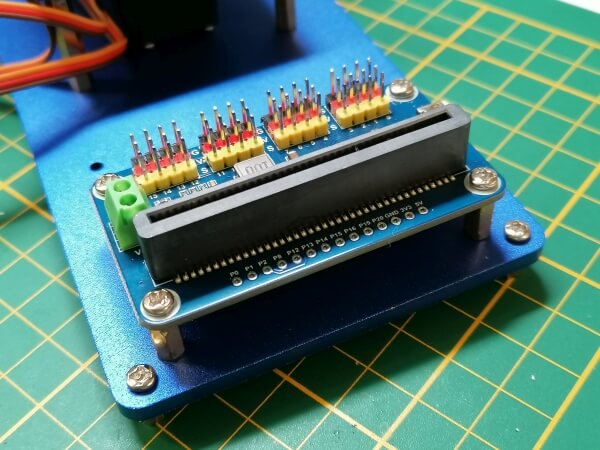
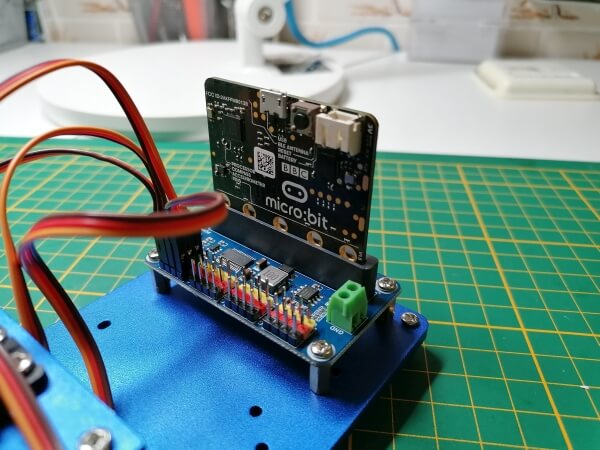
Schritt 10 – montieren der Adapterplatte für den BBC micro:bit
Im letzten Schritt wird der Adapter für den BBC micro:bit angeschraubt. Die Bohrungen auf der Bottom Plate sind auch passend für den Raspberry Pi.

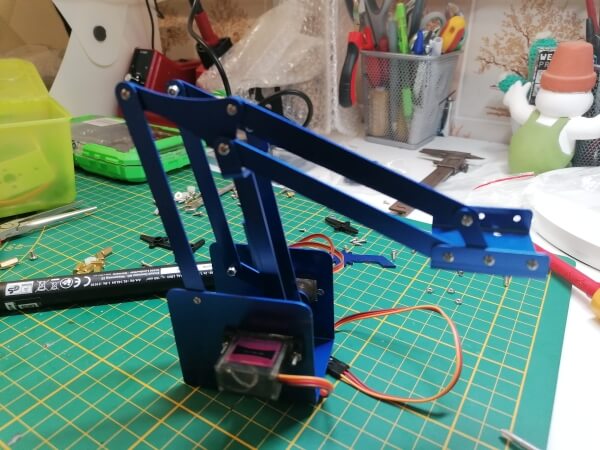
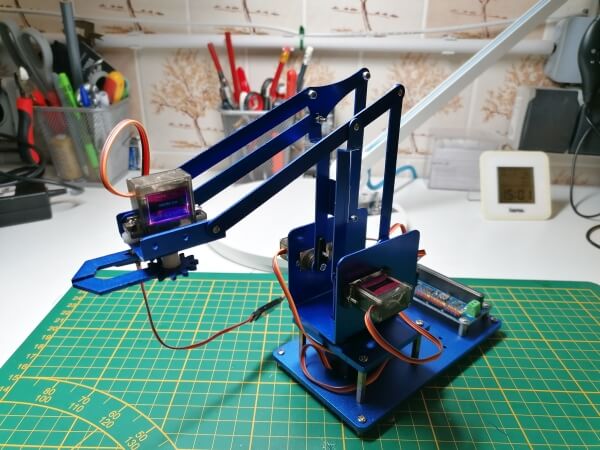
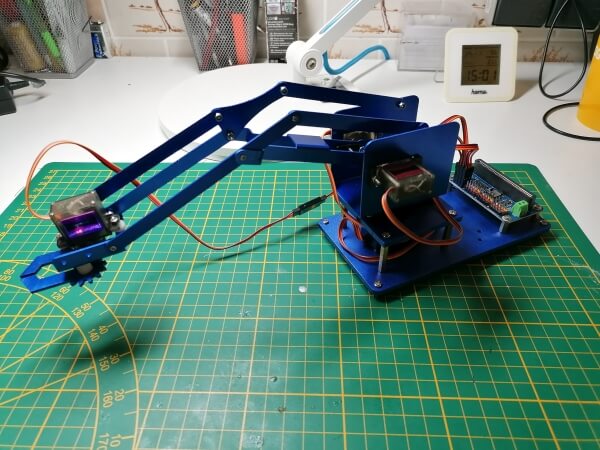
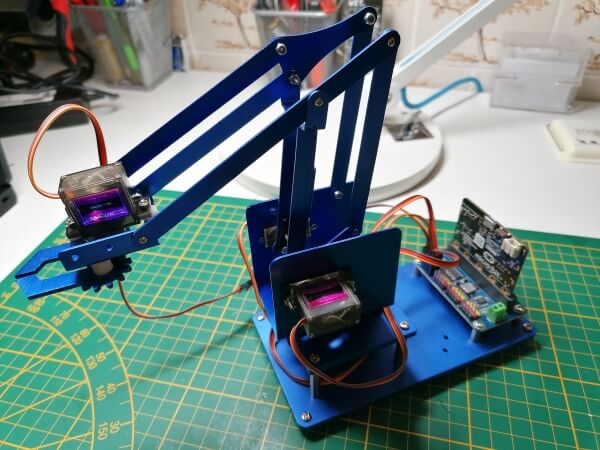
Fertiger Metallroboterarm
Der fertige Metallroboterarm hat folgende Abmaße:
- maximale Höhe: 18,5 cm
- maximale Länge: 25 cm
- Arbeitsradius: knapp 50 cm

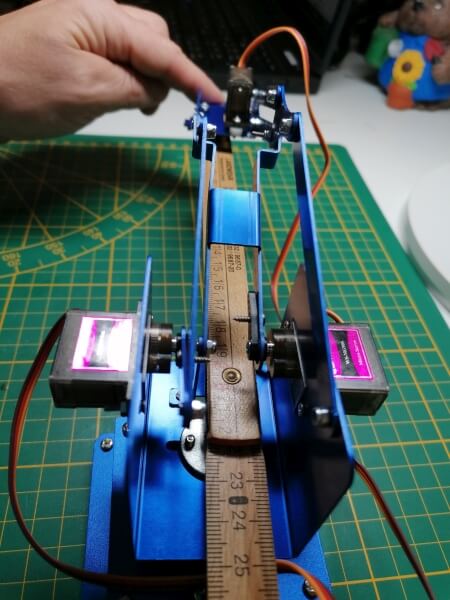
Die Klaue bzw. der Greifer des Roboterarms kann sich bis auf 8,5 cm öffnen und es schließt sich auch ohne Lücke.

Wie man diesen Roboterarm programmiert, zeige ich dir im nächsten Teil.
Fazit & Ausblick
Der Aufbau gemäß der Anleitung war recht einfach, jedoch hätte ich mir gewünscht, dass es mehr von den selbst sichernden Muttern im Kit gibt. Auch die beiden Kreuzschraubendreher sind nützlich, könnten jedoch durch einen 4,5 mm Maulschlüssel ergänzt werden.
Des Weiteren wären zwei kleine Kabelbinder nützlich, um das Kabel vom Servomotor der Klaue am Arm zu befestigen.
In kommenden Beiträgen werde ich dir noch zeigen
- wie du die Servomotoren ausrichtest,
- wie du den Metallroboterarm mit dem BBC micro:bit in MakeCode programmierst,
- wie du den Metallroboterarm mit dem Arduino UNO R3 & dem Shield PCA9685 in der Arduino IDE programmierst
Letzte Aktualisierung am: 30. September 2025
