In diesem Beitrag möchte ich dir zeigen wie du mit einem Impuls eines Ultraschallabstandssensor vom Typ HC-SR04 einen Piezo Buzzer am Arduino UNO R3 programmierst.

Die Idee zu diesem Beitrag kam von einem Leser meines Blogs und daher geht zunächst ein Dank an Antonio T..
Benötigte Ressourcen für dieses Projekt
Für den Nachbau dieses kleinen Projektes, benötigst du:
- Arduino UNO R3*,
- Piezo Buzzer* **,
- Ultraschallabstandssensor HC-SR04*,
- ein Breadboard mit min. 400 Pin*,
- diverse Breadboardkabel*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
** Den Piezo Buzzer bekommst du in mehreren Varianten, für den Arduino UNO R3 benötigst du eine 5V Version. Die 3V Version kannst du für zum Beispiel den ESP8266 verwenden. Der Grund ist hier recht einfach die Mikrocontroller haben eine unterschiedliche Spannung an den GPIO Pins und daher liegt bei einem HIGH Signal entweder 3.3V oder 5V an.
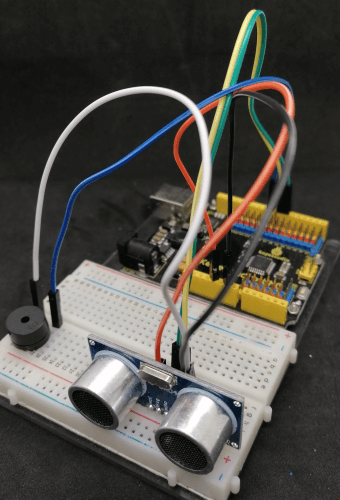
Aufbau der Schaltung
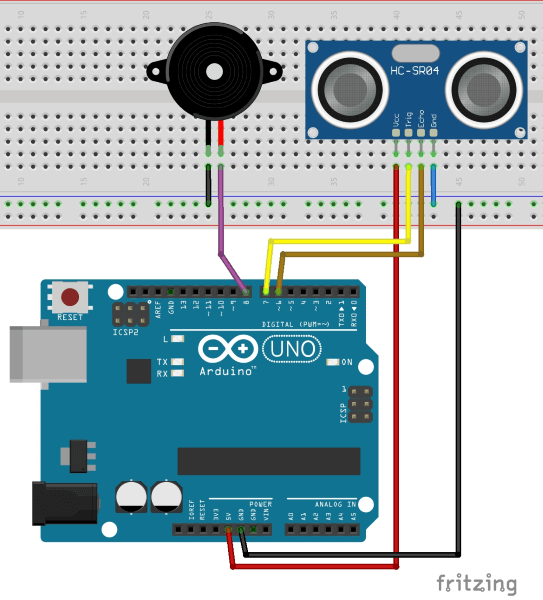
Hier nun die Tabelle mit den Zuordnungen der Pins der Bauteile zum Arduino UNO R3.
| Bauteil | Arduino UNO R3 |
|---|---|
| Piezo Buzzer | |
| + | digitaler Pin D8 |
| – | GND |
| Ultraschallabstandssensor HC-SR04 | |
| VCC | 5V |
| Trigger | digitaler Pin D7 |
| Echo | digitaler Pin D6 |
| GND | GND |
Du kannst diese Belegung auch nutzen um den Aufbau an einem Arduino Nano V3 oder einen anderen baugleichen Mikrocontroller zu verwenden.
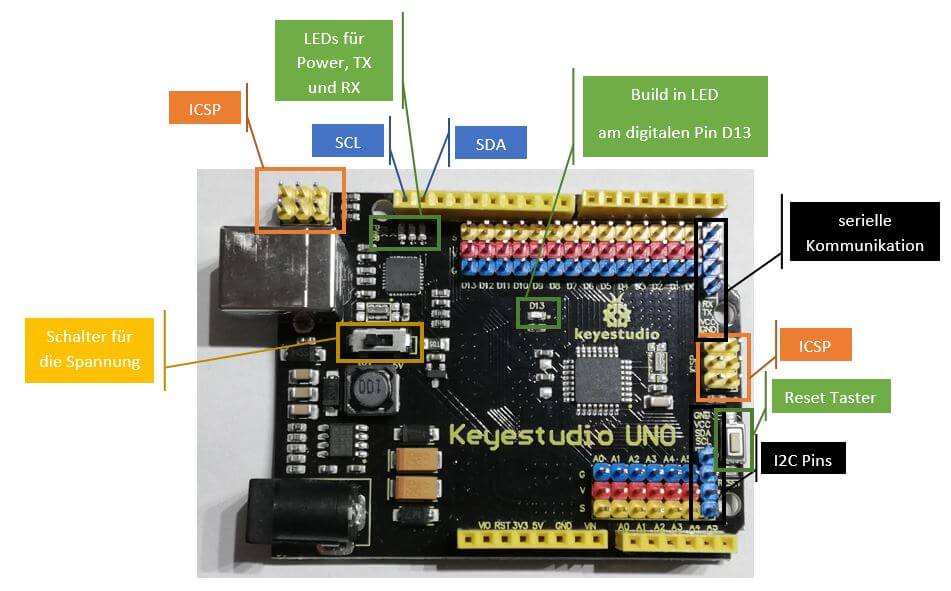
In meinem Fall verwende ich einen Keyestudio UNO R3, welcher ebenso gut funktioniert wie ein Arduino UNO R3, jedoch bietet der Mikrocontroller von Keyestudio ein paar nette Feature mehr.
Programmieren in der Arduino IDE
Wie du den Ultraschallabstandssensor HC-SR04 am Arduino UNO programmierst, habe ich dir bereits in einigen Beiträgen auf meinem Blog gezeigt. Und auch dem Piezo Buzzer habe ich schon ein paar Beiträge gewidmet.
Daher möchte ich dir hier lediglich zeigen, wie du auf eine Zustandsänderung vor dem Ultraschallabstandssensor reagieren und den Piezo Buzzer ertönen lassen kannst.
//Konstanten / Variablen für den Ultraschall Abstandssensor HC-SR04
const int TrigPin = 7; //Der PIN welcher auf das Trigger Signal gelegt wird.
const int EchoPin = 6; //Der PIN welcher auf das Echo Signal gelegt wird.
float distance = 0;
float offset = 4;
const int BuzzerPin = 8;
const int maxBeep = 5;
void setup() {
Serial.begin(9600); //Die Übertragungsgeschwindigkeit setzen.
pinMode(TrigPin, OUTPUT); //Den Trigger auf das Output Signal des Arduino UNO R3 setzen.
pinMode(EchoPin, INPUT); //Das Echo auf das Input Signal des Arduino UNO R3 setzen.
pinMode(BuzzerPin, OUTPUT); //Den positiven Pin des Piezo Buzzers als Ausgang definieren.
}
void loop() {
// lesen des aktuellen Wertes des Ultraschallabstandssensors
float newDistance = getUltrasonicValue();
// Ausgeben des Wertes auf der seriellen Schnittstelle
Serial.println(newDistance);
// Wenn der neue Wert größer oder kleiner als der alte Wert (inkl. dem Offset) ist,
// dann soll ein Ton ausgegeben werden.
if (newDistance > (distance + offset) || newDistance < (distance - offset)){
// Ausgeben von Tönen
for(int i=0;i<maxBeep;i++){
// einen Ton in der Frequenz von 500 Hz ausgeben
tone(BuzzerPin, 500);
// eine Pause von 50ms.
delay(50);
// die Ausgabe von Tönen stoppen
noTone(BuzzerPin);
// eine Pause von 250ms.
delay(250);
// Ausgeben des Textes auf der seriellen Schnittstelle.
Serial.println("beep");
}
// die Ausgabe von Tönen stoppen
noTone(BuzzerPin);
// zuweisen des neuen Wertes auf die globale Variable "distance"
distance = newDistance;
}
delay(2500); //1sek. warten
}
float getUltrasonicValue() {
digitalWrite(TrigPin, LOW); //Trigger Signal ausschalten
delayMicroseconds(2); //2 ms warten
digitalWrite(TrigPin, HIGH); //Trigger Signal einschalten
delayMicroseconds(10); //10ms warten
digitalWrite(TrigPin, LOW); //Trigger Signal ausschalten
float cm = pulseIn(EchoPin, HIGH) / 58.0; //Das Empfangene Echo Signal in cm umrechnen
//Da der Sensor mit einer Messgenauigkeit von 0,3cm arbeitet können wir das
//Ergbnis auf 2 Nachkommastellen begrenzen
return (int(cm * 100.0)) / 100.0;
}
Video – Ultraschallabstandssensor zum aktivieren eines Piezo Buzzer am Arduino
Letzte Aktualisierung am: 09. März 2024

Vielen Dank für den tollen Beitrag ist wirklich sehr hilfreich.