Im letzten Beitrag habe ich dir gezeigt, wie man am Calliope Mini DC-Motoren anschließt und steuern kann, hier soll es nun darum gehen, wie du ein 2WD Chassis vom Calliope Mini selbst steuern lassen kannst.

Benötigte Ressourcen
Für diesen Beitrag verwende ich:
- einen Calliope Mini 3*,
- ein USB-C Datenkabel,
- einen Ultraschallabstandssensor HC-SR04 mit Grove-Schnittstelle,
- ein Grove Anschlusskabel,
- ein LiPo Batteriemodul 18650* (mit passendem LiPo Akku*),
- ein kurzes USB-C-Kabel*,
- ein 2WD Chassis*
Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links. Wenn du über diese Links einkaufst, erhalte ich eine kleine Provision, die dazu beiträgt, diesen Blog zu unterstützen. Der Preis für dich bleibt dabei unverändert. Vielen Dank für deine Unterstützung!
Zusätzlich verwende ich noch ein kleines Anschlusspaneel für die Motoren. Mit diesem Paneel ist es einfacher möglich, die Litzen von den Motoren mit Breadboardkabel zu verbinden (alternativ kannst du auch kleine Lüsterklemmen* verwenden).
Unterschiede zwischen den Ultraschallabstandssensoren HC-SR04
Auf dem Markt gibt es diverse Arten von Ultraschallabstandssensoren, zum einen mit Grove-Schnittstelle und mit Stiftleisten.
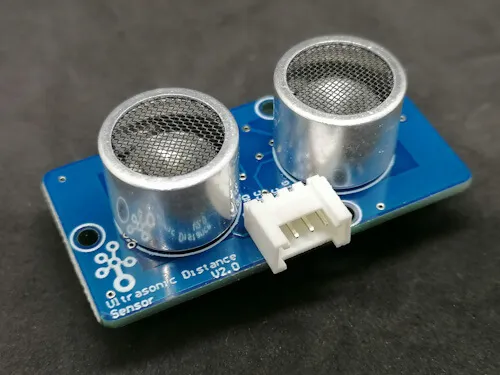
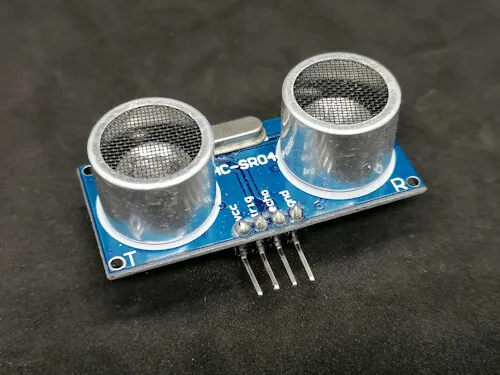
Es gibt bei diesen Sensoren zwei Unterschiede, zum einen hat der Sensor mit Grove-Schnittstelle nur einen Daten Pin und zum anderen arbeitet dieser Sensor mit einer Spannungsversorgung von 3,2 V bis 5,2 V. Der andere Sensor mit Stiftleisten hat eine Betriebsspannung von 5 V. Da der Calliope Mini lediglich 3V liefert, müssen wir auf den Sensor mit Grove-Schnittstelle zurückgreifen!
Wie funktioniert ein Ultraschallabstandssensor?
Ein Ultraschallabstandssensor besteht aus einer Sendeeinheit (Trigger) und einer Empfangseinheit (Echo). Der Sensor sendet ein Ultraschallsignal als Triggersignal aus, und wenn dieses Signal auf einen Gegenstand trifft, wird es reflektiert und als Echo zurückgesendet.
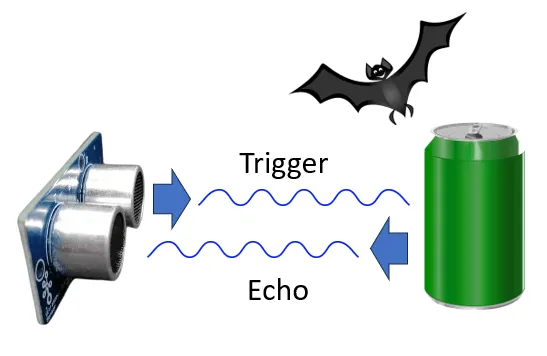
Durch die Messung der Zeit, die das Signal benötigt, um zum Objekt und zurück zur Empfangseinheit zu gelangen, kann der Sensor den Abstand zum Gegenstand präzise berechnen. Diese Abstandsmessung erfolgt in Zentimetern und ermöglicht dem Ultraschallabstandssensor, in Echtzeit genaue Informationen über die Entfernung zu einem Objekt zu liefern.
Anschluss des Ultraschallabstandssensors via Grove-Schnittstelle an den Calliope Mini 3
Der Ultraschallabstandssensor verfügt wie bereits mehrfach erwähnt über eine Grove-Schnittstelle, diese hat den Vorteil, dass man mit einem vorkonfektioniertem Kabel diesen an den Calliope Mini anschließt und somit wenig Fehler beim Verkabeln machen kann. Dieser Stecker passt auch nur in eine Richtung gewallt frei in die Buchse!
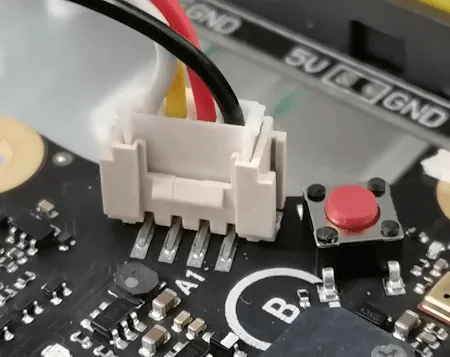
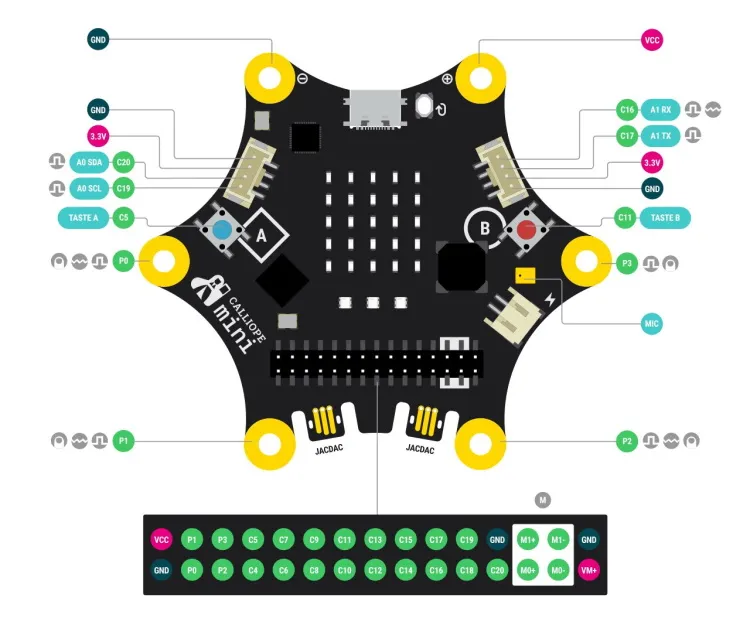
Schauen wir uns kurz das Pinout des Mikrocontrollers an, dort sehen wir, dass die zwei Grove-Buchsen an den Pins „A0“ C20, & C19, sowie „A1“ C16 & C17 angeschlossen sind.
Stromversorgung für das 2WD Chassis mit Calliope Mini 3 und Ultraschallabstandssensor
Dem Calliope Mini 3 liegt ein Batteriefach für 2 AA-Batterien bei und damit kann man diesen unabhängig vom USB-Kabel (Verbindung zum PC) betreiben. Jedoch reicht die Leistung für das 2WD Chassis nicht aus und das Gefährt hat keine Leistung.
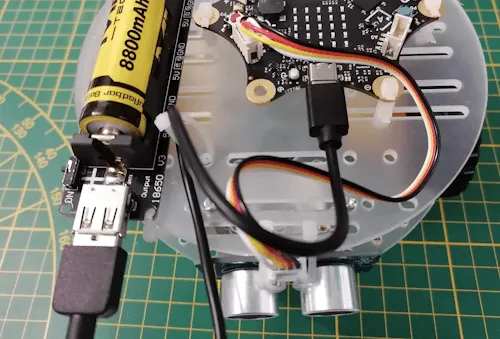
Hier habe ich als externe Stromquelle eine LiPo Batterie vom Typ 18650 mit 8800mAh und ein entsprechendes Expansionsmodul genommen.

Es gibt die Expansionboards für 1,2 und 4 LiPo Batterien und auch haben diese zusätzlich eine Micro-USB oder USB-C Schnittstelle um gleich auch die LiPO-Batterie zu laden.
Vorsicht beim Umgang und der Lagerung von LiPo Batterien
Umgang mit LiPo-Batterien:
- Vorsicht vor Überladung: Verwende nur passende Ladegeräte und halte dich an empfohlene Ladespannungen.
- Überhitzung vermeiden: Achte darauf, dass die Batterien nicht überhitzen, sowohl während des Ladens als auch bei der Verwendung.
- Korrekte Verbindung: Stelle sicher, dass die Batterien korrekt mit dem Gerät verbunden sind, um Kurzschlüsse zu verhindern.
Lagerung von LiPo-Batterien:
- Kühler, trockener Ort: Bewahre die Batterien an einem kühlen, trockenen Ort auf, um ihre Lebensdauer zu erhalten.
- Teilentladung vor Lagerung: Lagere die Batterien bei etwa 50 – 60 % ihrer Kapazität, um Selbstentladungseffekte zu minimieren.
- Schutz vor Beschädigung: Vermeide physische Schäden, indem du die Batterien sicher aufbewahrst und nicht lose in Taschen oder Schubladen lagerst.
- Regelmäßige Überprüfung: Untersuche die Batterien regelmäßig auf äußere Schäden. Bei Rissen oder Schwellungen sollte die Batterie nicht mehr verwendet werden.
Diese Tipps helfen, LiPo-Batterien sicher zu verwenden und ihre Lebensdauer zu maximieren. Beachte immer die Herstelleranweisungen und handle im Zweifelsfall sicherheitsbewusst.
Aufbau des 2WD Chassis, damit der Calliope Mini 3 es selbst steuern kann
Nachdem ich dir einige Grundlagen vermittelt habe, möchte ich in das eigentliche Thema einsteigen und dir erläutern, wie du den Calliope Mini 3 so programmierst, dass dieser ein 2WD Chassis selbst steuern kann.
Für das selbstständige steuern haben wir einen Ultraschallabstandssensor angeschlossen, so kann dieser seine Umgebung wahrnehmen und auf Objekte reagieren. Das ist auch die einfachste Form, um solch ein Gefährt fahren zu lassen.
Anschluss der Stromversorgung
Die Stromversorgung erfolgt hier nun via USB-C Schnittstelle und der zuvor gezeigten LiPo-Batterie, du klemmst also nicht mehr das Batteriefach an den Calliope an. Auch entfällt bei dieser Art der Stromversorgung der Anschluss für die Motoren!
DC-Motoren mit dem Calliope Mini verbinden
Wie im letzten Beitrag bereits gezeigt, habe ich mir eine kleine Anschlusspaneele gelötet, mit welcher ich die Litzen, welche von den DC-Motoren kommen, einfach auf Buchsenleisten via Schraubklemmen umleiten kann. Das macht das Anschließen deutlich einfacher, da so die Kabel besser und sicherer mit dem Mikrocontroller verbunden werden.

Programmieren in MakeCode
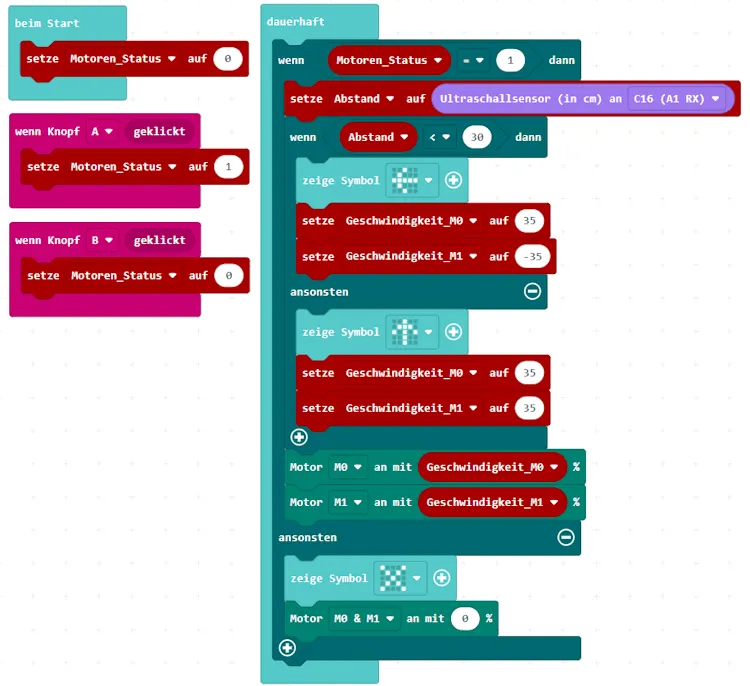
Jetzt ist die kleine Schaltung aufgebaut und wir können mit der Programmierung starten. Aber Achtung, denn sobald wir den Code auf den Mikrocontroller hochladen, fährt dieser los! Wir müssen also entweder unser 2WD Chassis so positionieren, dass die Räder frei drehen können oder es einfach beim Hochladen des Codes mit der Hand anheben.
Alternativ kannst du auch einen der beiden Taster als EIN/AUS Signal für die Schaltung nutzen und so die Motoren deaktivieren.
Geschwindigkeit vs. Reaktionszeit
Im Code (sieh Bild) habe ich die Motoren auf 35 % laufen lassen. Dieses ist, wie ich finde, ein sehr guter Wert, sodass der Mikrocontroller genug Zeit hat auch auf Objekte zu reagieren. Solltest du die Geschwindigkeit erhöhen, so musst du auch den Wert für den Abstand erhöhen!
Download des Codes als HEX-Datei
Damit du den Code nicht nachbauen musst, kannst du dir diesen nachfolgend einfach als HEX-Datei herunterladen und danach importieren.
Fazit & Ausblick
Mit einem Ultraschallabstandssensor kannst du recht einfach ein 2WD Chassis mit dem Calliope Mini 3 selbst steuern lassen. Im nächsten Beitrag möchte ich dir dann gerne zeigen wie du eine Linie folgen kannst, dazu benötigen wir dann einen anderen Sensor, welcher auf Licht bzw. Helligkeitsunterschiede reagiert.
Hast du noch weitere Ideen oder Fragen? Dann schreibe mir diese in die Kommentare oder per Mail an info@draeger-it.blog.
Letzte Aktualisierung am: 07. Juni 2024
